Motor control made efficient with MAX40056
Follow article
 Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
According to the International Energy Agency’s latest report in 2017, motor systems consume 53% of global electricity. It has been estimated that 20 to 30% of that power can be saved by increasing the efficiency of motor-driven systems, which includes pumps, fans, compressors and industrial product machinery. For detailed information on various types of motors and their applications, refer to this article from DesignSpark.
Precise motor control is absolutely crucial for ensuring efficient as well as the safe operation of such systems. In motor-control circuitry, current is measured to identify information on the motor torque. From our basic knowledge of motors, we remember that current is directly proportional to those parameters. Thus, current is sensed, monitored and fed back to the motor-control loop.
Current sense amplifiers (CSA) are commonly used for monitoring the current signal in and out of control loop with a very high level of precision. Three current-measurement configurations are commonly employed with CSAs: high-side, low-side and in-line current sensing.
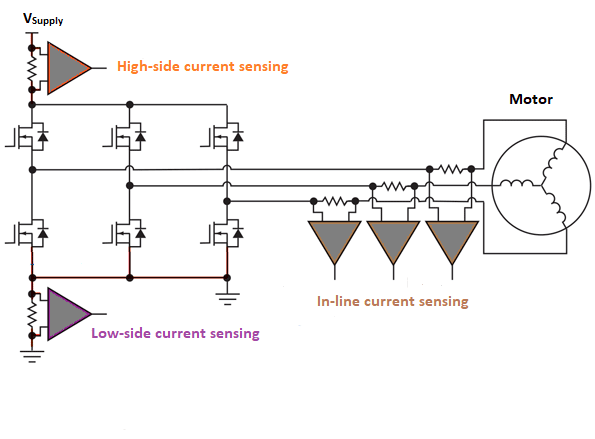
In low-side current sensing, the sense resistor is connected in series with the ground path. CSA then measures voltage across that resistor. However, this method creates a disturbance to the system’s ground potential and does not allow motor fault detection. On the other hand, the sense resistor is connected in series with the supply voltage in high-side current sensing. The drawbacks of this technique are the presence of very high common-mode signals and inability to detect the phase current of the motor. Lastly, in-line phase current sensing involves connecting individual CSAs directly to the motor windings and measuring the inductive phase currents supplied to the motor. The challenge when implementing this configuration is common-mode PWM voltage, which has a relatively large amplitude and wide bandwidth. Such variation in the input signal causes instabilities in the output signal. The differential signal that carries the useful information needs to be retrieved by using PWM rejection circuitry. Fast settling time is also vital when choosing what CSA to implement for motor-control systems.
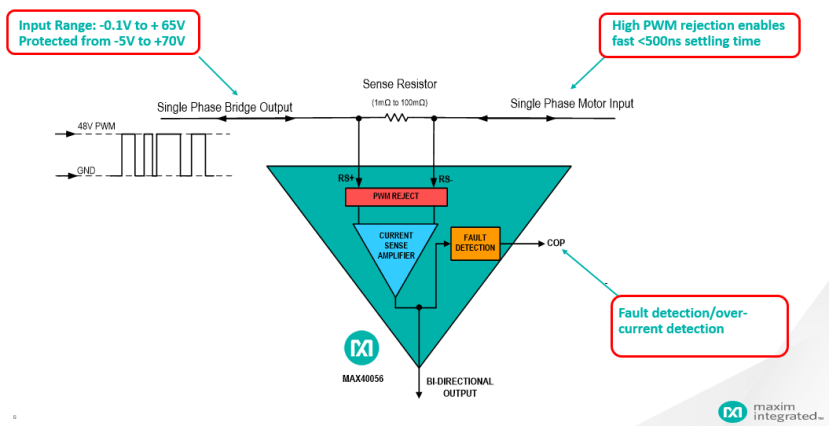
MAX40056 (196-8967) is a high accuracy, bidirectional current-sense amplifier from Maxim Integrated with input range extending from -0.1V to +65V that is ideal for motor control applications. The fault detection and overcurrent detection features of MAX40056 accommodate common-mode input voltages from -5V to +70V. This CSA also features a built-in PWM-Rejection module with capability to reject PWM signals with slew rates up to and beyond ±500V/µs.
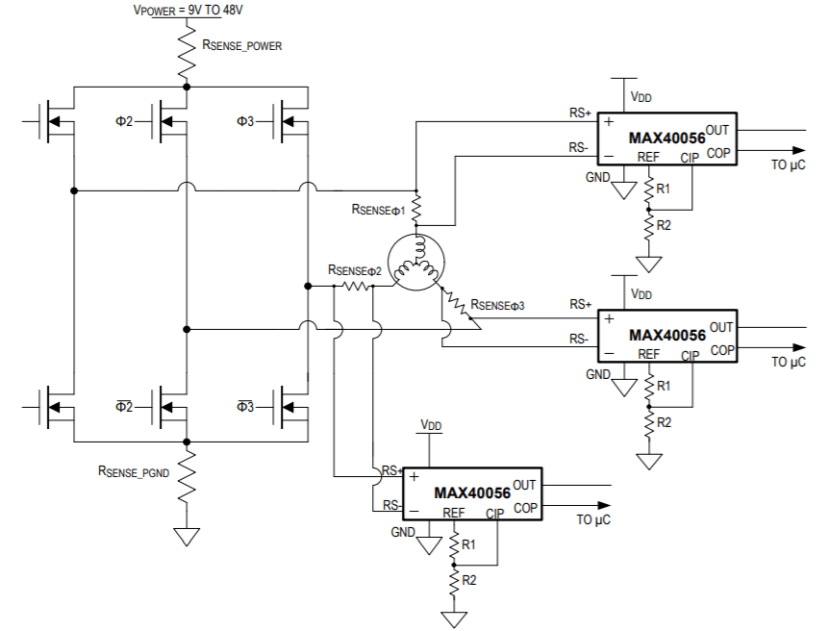
The diagram below demonstrates the current-sensing configuration for 3-phase servo motor with MAX40056. Driven by the microcontroller, the PWM signal is generated by three pairs of power MOSFETs (metal–oxide–semiconductor field-effect transistor), which then cause the rotation in the servo motor. The current in each line is measured using the pair of Kelvin-Sensing PCB Resistors and CSAs. The output of CSA is then sent to the ADC (analog-to-digital converter), not shown in the diagram. Sampled and digitized data of the current’s phase and magnitude is processed by the microcontroller, closing the feeback loop of the motor control system.
Motors are one of the most expensive and power consuming elements of industrial and automotive markets. However, the efficiency of motor-driven systems can be greatly improved by implementing precise control measures. The current-sensing amplifier is a critical part of the control loop. MAX40056 from Maxim Integrated offers a high common-mode input range, PWM rejection capability and fast settling time making it ideal for motor control applications.