Mindful Droid - Sensibiliser et changer les niveaux de pollution de l'air : 2e partie
Suivez l'article
 Dave from DesignSpark
Dave from DesignSpark
Que pensez-vous de cet article ? Aidez-nous à vous fournir un meilleur contenu.
Dave from DesignSpark
Merci! Vos commentaires ont été reçus.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
Que pensez-vous de cet article ?
Mindful Droid 2.0 - Guide de construction
Le Mindful Droid est un dispositif de sensibilisation à la pollution de l’air. Ce robot d'alerte numérique encourage passivement l'activisme des écoliers sur leur trajet domicile-école et les avertit visuellement des effets de la pollution de l'air et des moyens de la prévenir.
Avec l'assemblage de l'ESDK, un dispositif qui détecte la qualité de l'air en utilisant les capteurs PM2.5, VOC, et CO2, le Droid sera capable de lire les données sur la qualité de l'air, en apportant une sensibilisation visuelle de ces données sous une forme facile à comprendre pour les utilisateurs.
Le Droid est également capable de surveiller les données à l'extérieur, en émettant des signaux d'alerte appropriés en fonction de l'environnement dans lequel il se trouve. Dans ce cas, ce sera pendant les trajets domicile-école-domicile.
La construction du Mindful Droid a suivi le principe de simplicité et de rigueur dans les moindres détails. Par conséquent, l'approche du raffinement constant assure la facilité d'assemblage et d'utilisation pour d'autres personnes.
En continuant la 1e partie de mon article, la phase suivante a été d'obtenir la conception de la carte PCB faite et commandée, avec d'autres matériaux pour la construction en place pour la construction.
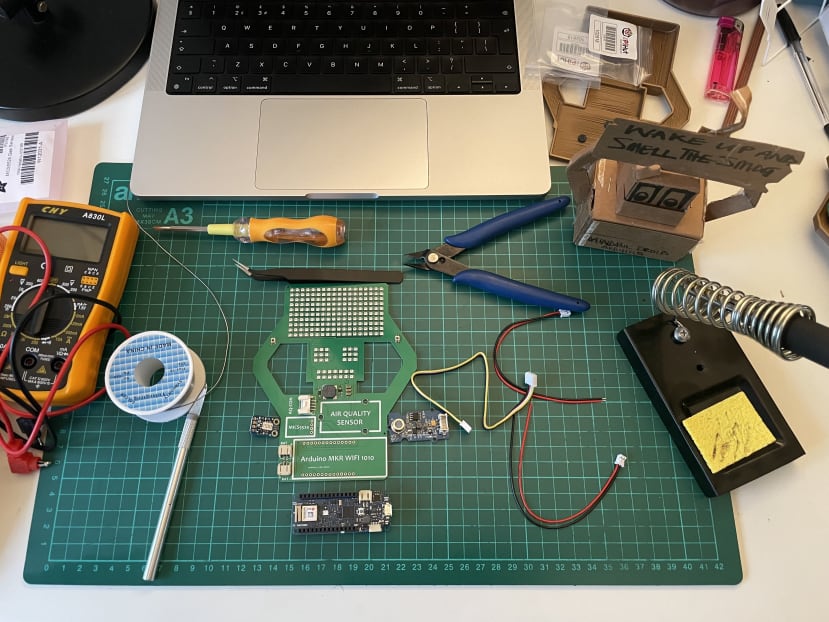
Conception du PCB et liste des pièces électroniques
- Conception de la carte PCB
- Arduino, MKR WIFI 1010 - (176-3647)
- Seeed Studio Air Quality Sensor v1.3 Grove System, test de la qualité de l'air intérieur
- Capteur de gaz MQ-7 (monoxyde de carbone) × 1
- Pack batterie lithium-ion haute capacité (6700mAh) × 1
- Câble JST PH 2 broches - Connecteur femelle à femelle 150mm × 2 (Si non disponible, épisser deux femelles ensemble)
- HARWIN M20, pas de 2,54mm, 36 voies, 1 rangée, connecteur à broche à angle droit, trou traversant
- RS PRO, Vis à tête cylindrique à six pans creux M3 x 6 mm en acier inoxydable lisse
- RS PRO, insert fileté en laiton M3 diamètre 4mm profondeur 4,78mm
- RS PRO, vis à tête fraisée Pozidrive M2 x 5mm en acier inoxydable
Outils
- Fils pour le câblage du PCB (devraient être fournis avec les capteurs)
- Ruban adhésif à double face
- Fer à souder, soudure, etc.
- Pistolet à colle
- Couteaux-scalpels
- Brucelles
- Pinces coupantes pour fils métalliques
- Pieds à coulisse
- Perceuse à main
- Dremel / Lime à main
Liste des pièces de la carte PCB
| Commentaire | Valeur | Description | Indicateur | Empreinte | Quantité | Pièce n°. |
|---|---|---|---|---|---|---|
| BUZZER | 8.5mm 3.3mm Externally Driven 8.5mm 80dB@5V,10cm 2.5V~4.5V | B1 | BUZZER - 8.5mm 3.3mm | 1 | C94599 | |
| BAT-CON | BAT1, BAT2 | LIPO BAT-CON | 2 | C47647 | ||
| Cap | 0.1uF | Condensateur | C1 | 0603 cap | 1 | C519438 |
| Cap | 100uF | Condensateur | C2, C3, C4 | 1206 CAP | 3 | C312983 |
| Diode Usage général | Diode par défaut (IN4007) | D1 | SOD123 | 1 | C181127 | |
| mmbt2222a | NPN Amplificateur polyvalent | Q1 | SOT23 | 1 | C181121 | |
| Res | 100 | Résistance | R1 | 0603 res | 1 | C22775 |
| Res | 10K | Résistance | R2, R3, R4 | 0603 res | 3 | C25804 |
| Bouton poussoir | Bouton poussoir (C3318895) | S1, S2 | BOUTON POUSSOIR 3 x 4,65mm | 2 | C318895 | |
| MKR WIFI 1010 | U1 | MKR WIFI 1010 | 1 | |||
| GROVE AIR QUALITY CON | U2 | CONNECTEUR SMD 4 BROCHES | 1 | C541776 | ||
| MICS5524 | U3 | MICS5524 | 1 | |||
| A-LED | WS2812B Led adressable | U4, U5, U6, U7, U8, U9 | WS2812B-2020 | 212 | C965555 |
REMARQUE
Si c'est quelque chose de nouveau pour vous comme pour moi, il serait préférable de faire concevoir la carte PCB et de fixer les principaux composants directement auprès des fabricants de PCB. Je vais partager les fichiers nécessaires pour commander la carte PCB et le lien vers les fabricants. Cependant, si vous êtes déjà familiarisé avec le sujet, la liste des pièces ci-dessus vous aidera à construire la carte PCB.
Phase de construction et d'assemblage
La construction de ce projet a été un énorme processus d'apprentissage pour moi, et en tant qu'ingénieur de conception, on pourrait s'attendre à ce que j'en sache beaucoup plus, mais ce ne fut pas le cas. Sur ce projet, j'ai appris à souder pour la première fois (incroyable, je sais) et j'ai fait d'autres découvertes.
Comme prévu, j'ai eu quelques difficultés avec ce projet. Certains d'entre eux étaient : un capteur qui ne fournissait pas les résultats appropriés, l'obligation de dessouder le capteur et d'essayer de le réparer avec un autre composant de capteur, l'apprentissage du code et aussi la gestion des problèmes de conception pratique pour les fixations du boîtier du Droid.
Ce projet n'aurait pas été possible sans l'aide et les conseils d'un ami Wiz, qui fait également partie des influenceurs de DesignSpark Ahmed Oyenuga - Ahmsville. Jetez un coup d'œil sur son projet génial et sur ses progrès.
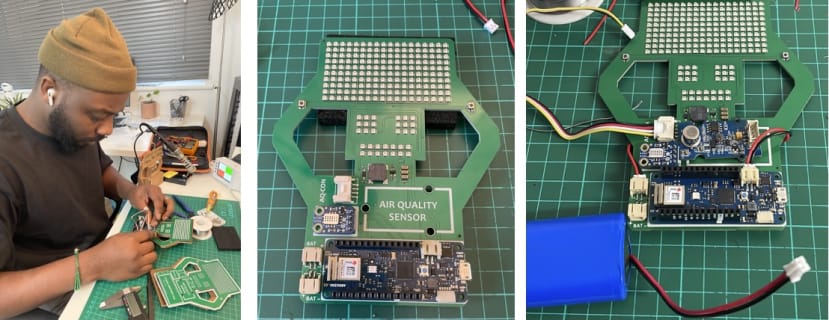
Composants sur la carte PCB
J'ai commencé par souder la carte Arduino sur la carte PCB, en plaçant les broches dans les trous et en les soudant à l'arrière de la carte PCB. J'ai également fait de même avec le capteur en utilisant des broches d'en-tête. Comme c'était la première fois que je soudais, j'ai dû m'assurer que la température de la soudure était d'environ 350 °F et qu'il n'y avait pas de pontage de soudure sur les broches.
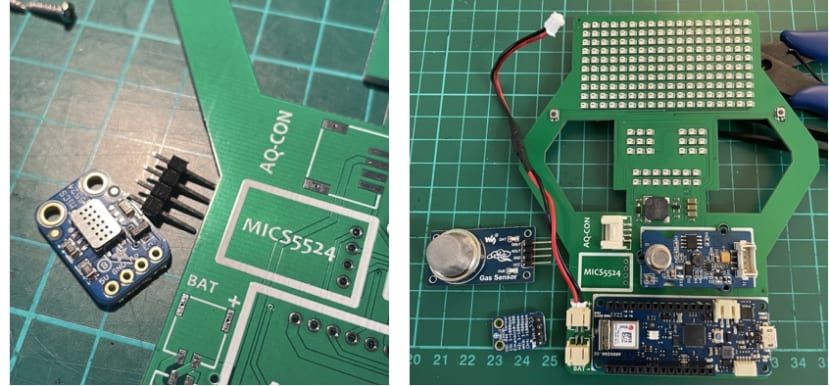
J'ai mentionné que j'avais eu des problèmes avec un capteur qui ne donnait pas des résultats précis et c'était le capteur de gaz MICS5524, que je n'ai pas ajouté à la liste des pièces, bien qu'il soit sur la carte PCB. J'ai dû le remplacer par un capteur de gaz MQ-7 qui, je l'espère, donnera les mesures extérieures de CO souhaitées. Mon article fini abordera et résoudra la question de la connexion du nouveau capteur de CO à la carte PCB.
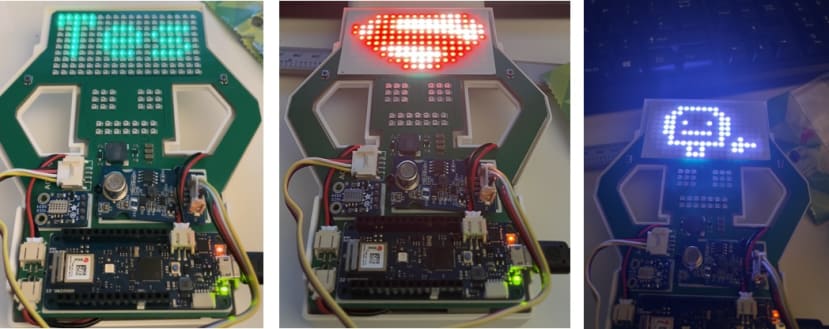
Une fois cette question réglée, la phase suivante consistait à tester les LEDs RVB adressables, à souder les composants et à vérifier la connectivité. Vous trouverez ci-dessous une courte vidéo que j'ai réalisée pendant le test du Mindful Droid, où Ahmed et moi-même sommes un peu emballés par le résultat du test.
Voici d'autres exemples de résultats possibles avec les LED adressables.
Les LED fonctionnant comme prévu, il s'agit maintenant d'intégrer le tout dans un boîtier compact et robuste, adapté aux déplacements à l'intérieur et à l'extérieur, ainsi qu'à l'utilisation par les enfants.
Les photos ci-dessous montrent l'étape en cours pour le boîtier. Ce qui a été un véritable défi. J'ai essayé de trouver une solution pour fixer les deux boîtiers ensemble tout en essayant de conserver de l'espace. Mon dernier recours était de l'agrandir, ce que je n'étais pas prêt à faire. J'ai essayé des rainures sur les bords et des mousquetons qui ont échoué et se sont cassés au cours du processus, ce qui m'a coûté du temps et plusieurs impressions ratées.

Avec beaucoup de persévérance, j'ai trouvé une solution en ajoutant des parties supplémentaires au corps du Droid, à savoir des oreilles et des pieds, qui serviront de support de fixation pour des vis minuscules mais durables, comme on le voit ci-dessous.

L'article final aura d'autres modifications avec le nouveau capteur CO. Il y aura des détails approfondis pour l'assemblage, les tests en temps réel et la collecte de données avec la connexion au cloud, le codage et la façon dont l'affichage LED pixel art a été généré en utilisant des programmes open source.
Les fichiers CAO et les schémas seront également mis à jour dans l'article final.