How the buck converter has evolved
Follow article
 Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
No-one knows how it came to be called a ‘Buck Converter’, but the term for a non-isolated, switched-mode circuit that efficiently steps a voltage down has become an industry standard. Early references can be found to ‘Type A choppers’ which could take the form of a mechanical ‘vibrator’, similar to a chattering relay which ‘chopped’ a DC rail, effectively producing square wave AC. This could then be used to magnetically ‘charge’ an inductor which released its energy in the ‘off’ period at a lower voltage. This must be done at some fast rate to allow the inductor to reset between charges but mechanical vibrators could only operate at a few hundred hertz so were noisy and wore out quickly. At low frequency, the inductor also had to be large to avoid saturation.
Electrically the buck converter takes the form of Figure 1. When SW1 is on, SW2 is off and current flows from the input to the output through L1. Before the inductor magnetically saturates, SW1 turns off and SW2 turns on, allowing the stored energy in L1 to discharge to the load with current flowing ‘upwards’ through SW2. The effect is a triangular current waveform through L1 with an average current, offset from zero, equal to the load current. The output capacitor C1 acts with the inductor as a low pass filter, so Vout has a low voltage ripple.

Figure 1: The basic elements of a buck converter
With the arrival of semiconductors, a transistor Q1 could be used for SW1 (Figure 2), and a diode D1 for SW2. This works because when Q1 turns off, point A naturally ‘flies’ negative as the inductor reverses its voltage, which forward biases the diode by a process called ‘commutation’, allowing it to conduct.

Figure 2: Semiconductor implementation of a buck converter
Buck converters are most useful when they provide a regulated output voltage with changing load or input voltage. This achieved by sensing the output, comparing it with a reference, then using the resulting error signal to vary the pulse width of the drive to Q1. Short pulses produce low average output voltage, long pulses, a higher average – the familiar Pulse Width Modulation technique (PWM). As Q1 is either hard-on, dropping little voltage, or hard-off dissipating no power, the circuit is efficient, certainly compared with the alternative ‘linear’ arrangement where the series control transistor is continuously conducting with the full input/out differential voltage across it. The frequency of operation is a compromise between the advantageous decreasing of inductor size at a higher frequency and increasing switching losses – as Q1 switches faster, its transient dissipation averages to a higher value.
The buck converter was first switched at a fixed frequency from a discrete pulse generator, but there were also simple self-oscillating versions that varied pulse width and frequency to achieve regulation, with what is called ‘hysteretic’ control. These circuits could be adapted to use early ICs intended for linear control such as the Texas Instruments µA723, first released in 1972. However, a seminal moment came in 1976 when the first dedicated fixed-frequency controller for a switched-mode power supply was introduced, the Silicon General SG3524.
Another important development was the introduction of ‘current mode’ control. Early circuits controlled output voltage by simply measuring it and correcting it by PWM. It was discovered in the late 1970s that if a second control loop was introduced, sensing switch current, the performance was much improved and the control loop was easier to stabilize. In the 1980s, the popular Unitrode UC384x series was introduced to implement the technique in one IC.
Today there are hundreds of controllers available with a host of features and protection mechanisms. The latest devices are ‘digital’ where the control is implemented in software algorithms for the highest performance and flexibility.
Switches in buck converters changed with advances in technology
High efficiency has always been the characteristic of the buck converter and the semiconductors are critical to achieving this. In early designs, Q1 was a bipolar transistor with a saturation of about 0.5V. PNP types were often used as opposed to the more common NPN, as the latter needs a drive voltage higher than the input, which was inconvenient. However, PNP transistors are costlier to make and are generally slower to switch, limiting efficiency, especially at high frequency. So, when P-channel MOSFETs became available a step improvement in efficiency was possible with the devices able to switch fast and showing, instead of a saturation voltage, a low on-resistance which could lead to very low dissipation. N-channel MOSFETs can also be used with even lower resistance along with a simple 'charge pump’ circuit to provide the necessary higher gate drive voltage.
Diode D1 also conducts the full load current for part of the switching cycle and this then becomes a limit to efficiency, especially with high down-conversion ratios, where it conducts for most of the cycle. Schottky diodes can be used for their lower voltage drop but a natural progression is to revert to the original idea of a switch, another MOSFET, this time conveniently an N-Channel type with the complication that it now must be actively driven on and off, in antiphase to Q1. The approach is known as ‘synchronous rectification’ and MOSFETs can be chosen with on-resistances in the range of milliohms for low conduction loss. Drive timing is critical however; Q1 and the synchronous rectifier must never conduct together, otherwise ‘shoot through’ occurs - a direct short across the input. A ‘dead time’ therefore is deliberately introduced, but this must not be too long, as the parasitic body diode in the MOSFET will conduct by ‘commutation’ and add excessive losses. The MOSFET body diode is typically far worse for conduction losses than a Schottky diode so sometimes a ‘Schottky’ is added in parallel to minimize dead time losses. PWM controllers are now available that provide the optimized drive to the switches, with dead-time sometimes dynamically controlled for best overall efficiency.
An effect was noticed as buck converters began to be used as ‘point of load’ regulators in systems that had multiple power rails; if a voltage is already present on the buck converter output as it powers up, perhaps via a ‘sneak’ path, the control loop can be fooled into thinking the output is already present. It then supplies short on-pulses to Q1 and long-off pulses to the synchronous rectifier, which sinks significant current from the external voltage source and possibly prevents correct start-up. The effect has come to be known as ‘pre-biased load’ and to counter it, controllers now often disable the synchronous rectifier for a short period on startup.
Current mode control has continued to be a popular control method, but ‘hysteretic’ converters with variable frequency have made a comeback recently. With improved noise control, the variation in frequency is less of an issue and the circuit has the advantages of inherent stability, simplicity and fast load transient response – within one switching cycle.
A typical modern buck converter circuit may look like Figure 3 where Q1 is the main switch and Q2 the synchronous rectifier. This implementation is good for several tens of amps but at higher loads, ‘multiphase’ techniques are used where there are multiple sets of switches and inductors with common input and output capacitors. This shares semiconductor stress and results in lower overall input and output ripple current if the stages are clocked sequentially. Dedicated controllers are available for multiphase converters, some of which can disable one or more of the phases at light load to improve efficiency under these conditions.
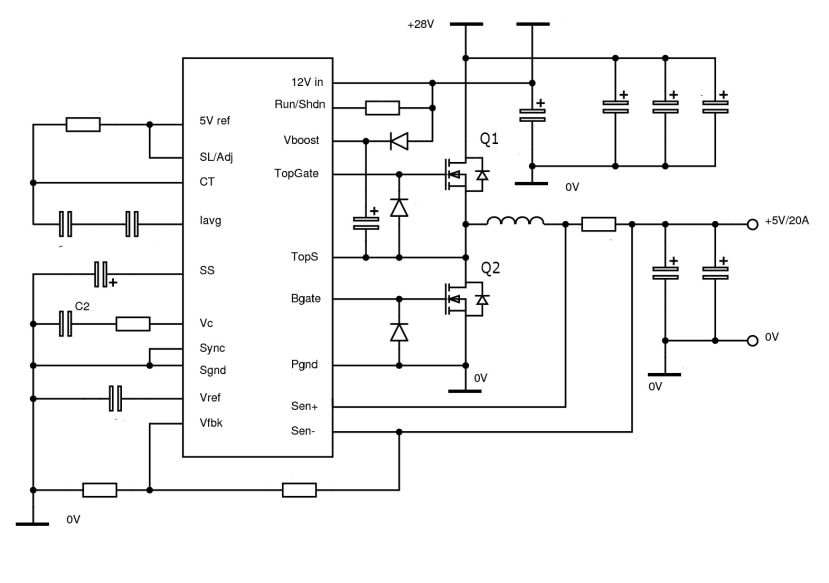
Figure 3: Typical modern implementation of a buck converter
The components around the IC in Figure 3 set parameters such as frequency, feedback loop response, under- and over-voltage protection levels and more. However, for many applications, these can be preset within the IC. In the late nineties, TI introduced the Simple SwitcherTM family which needed only an external inductor and diode for a complete solution. The original parts used bi-polar technology and low-frequency switching but modern versions operate up to 2.5MHz with MOSFETs for the main switch and integrated synchronous rectifier.
Inductors have been problematic to integrate
While semiconductor technology advanced in the 21st century improving efficiency and consequently reducing size for the same temperature rise, inductors have lagged. Physically they have also been difficult to integrate into ICs. Higher switching frequency allows smaller inductance values but risks increasing switching losses in the semiconductors and core losses in the inductor. Buck converter inductor ripple current is set by its inductance so modern circuits allow the ripple current to be high for small inductance values and corresponding small size. The trend has been enabled by improved output capacitor technology, particularly low ESR ceramic types, allowing high ripple current with low ripple voltage. Synchronous rectification also helps
by allowing ‘continuous conduction mode’ down to light loads – the inductor ripple current is allowed to go negative in part of the cycle. With a diode rectifier, this cannot happen and the converter enters ‘discontinuous conduction mode’ with a corresponding change in loop transfer function which can cause instability without a modified and compromised control loop response to load transients.
Traditionally, inductors have used wire on bobbins or sometimes directly on cores but the goal for power inductors in buck converters is for the component to be manufactured more in a ‘chip’ style, familiar in signal circuits. These might take the form of ‘films’ embedded in ferrite chips which can then be handled, placed and integrated into assemblies like any other surface-mount component. The substrate used could be a PCB in a moulded buck converter assembly or a lead frame, incorporating a wire-bonded die for the buck controller and power switches.
In a packaged buck converter module, the IC may be fitted using Flip-Chip-on-Leadframe (FCOL) technology for a very compact and low thermal resistance solution. If the inductor is ‘chip scale’, and close to the IC, it can achieve very low interconnection inductance and resistance for better efficiency and low EMI.
Integrated inductors now feature in the latest buck converter modules
An example of an integrated buck converter that uses the latest techniques to integrate the control IC and inductor is the RPMB series from RECOM. This features a thermally enhanced LGA package that is DOSA-compatible and has six-sided shielding for excellent heat management and EMC performance (Figure 4). Input range is up to 36V and efficiency is up to 94% allowing a full 3A of output current at an adjustable 1V to 24V in a package just 12.19 x 12.19 x 3mm.

Figure 4: The RPMB series integrated buck converter from RECOM
Another example of advanced packaging of a buck converter is the over-moulded RPX series from RECOM which features QFN (Quad Flat No-lead) terminations (Figure 5). The part has an adjustable 1.2 to 6V output at 2.5A and integrates power switches, control IC and inductor in an astonishingly small 4.5 x 4 x 2mm package, requiring just input and output capacitors, sized for the application.
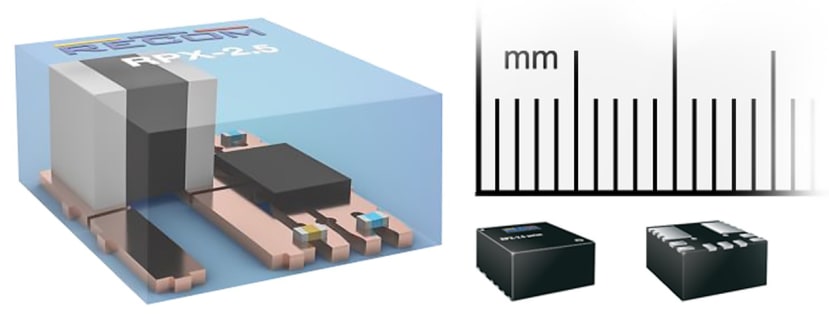
Figure 5: The RECOM RPX series of buck converters integrate a chip inductor in its Flip-Chip-on-Leadframe construction
RECOM leads the way in miniaturization with other products, using its ‘3D power Packaging’ techniques. Examples are the RPX-1.0 and RPX-1.5 series using FCOL technology. The parts can deliver 1A and 1.5A output respectively at adjustable output voltage from input voltages up to 36VDC, in an ultra-compact QFN package, just 3 x 5 x 1.6mm.
Conclusion
Buck converters have evolved from noisy and unreliable mechanical devices to true fit-and-forget components that have an amazing performance for their size. RECOM is at the forefront of the technology supported by distributor RS Components.