给您的机器人装上真正的火星探测器上使用的移动控制:第 4 部分
关注文章
 戴夫来自 DesignSpark
戴夫来自 DesignSpark
你觉得这篇文章怎么样? 帮助我们为您提供更好的内容。
戴夫来自 DesignSpark
Thank you! Your feedback has been received.
戴夫来自 DesignSpark
There was a problem submitting your feedback, please try again later.
戴夫来自 DesignSpark
你觉得这篇文章怎么样?
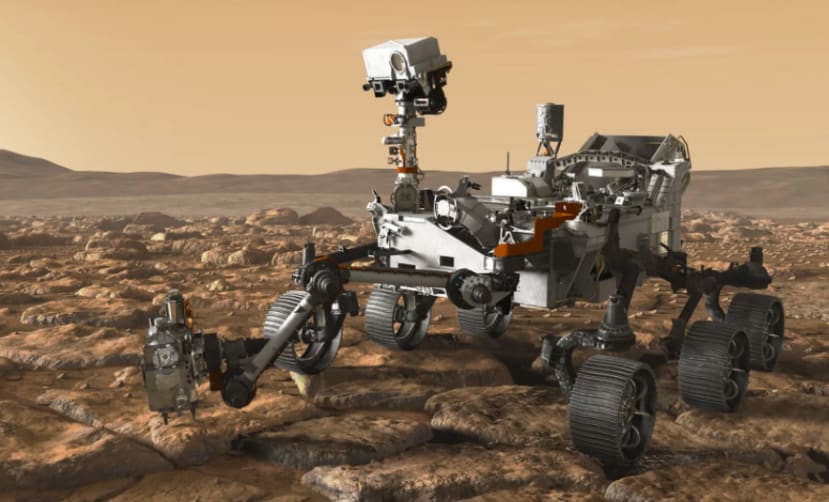
火星探测器 2020 来源:NASA/JPL
轮式机器人有多种形式:2 轮、3 轮、4 轮、6 轮或 8 轮,以及带悬架和不带悬架。机器人将要在上面移动的地形类型在很大程度上决定了选择:是良好、平滑的仓库地面还是粗糙、不可预知的火星表面?
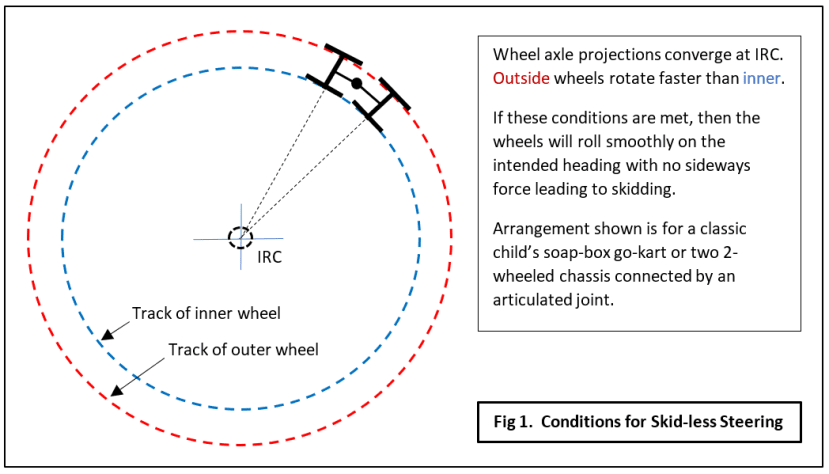
转向方法分为两大类:明显转向或差速转向。这两类都可以进一步分为真正转向或滑移转向。真正转向和滑移转向的选择取决于机器人要执行的任务。两者都适用于任何类型的地形,但是如果运动必须精准并且经过精确地测量,那么除了两轮机器,则需要提供某种形式的明显转向机构。在所有情况下,设计中必须包含一个瞬时旋转中心 (IRC)。任何需要精确定位的自主或半自主探测车都必须采用这种设计。IRC 概念非常容易理解,并且可以用图形来说明,而不需要复杂的数学。图 1 显示了一辆简单的铰接式四轮车如何在没有任何侧向滑移力的情况下进行转向。
四轮机器人
在图 2 中,我们还有三种简单的四轮移动机器人类型:一种可以精确操纵,另一种不太精确但更容易操纵。
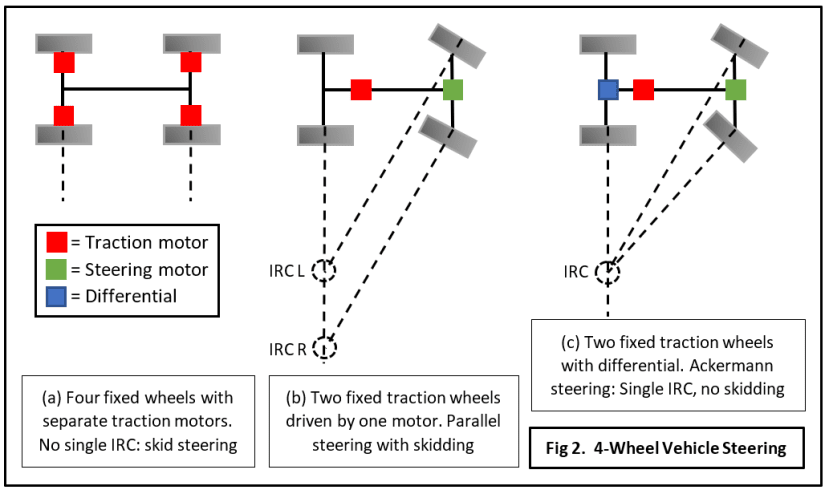
配置 (a)
带有独立电动机的固定轮。在这里,我们可以使用“差速转向”,这是指以不同于内侧的速度驱动另一侧的电动机。这满足了真正转向的一个要求,但不能满足每个前轮在转向时朝同一方向旋转的需要。换句话说,车轮继续向前滚动,但是速度差迫使它们侧向移动。最终,这种侧向力克服了摩擦,车辆滑移到新的方向。通常用于履带式车辆上,也称为“坦克转向”。
滑移转向的特点
- 以额外的电动机功率为代价,能够非常快速地更改方向。
- 每侧的车轮反向旋转时,车辆可在原地旋转。
- 全轮驱动适合崎岖地形。
- 设计简单,没有复杂的机械连杆。
- 通过旋转传感器进行的测距非常不准确。
- 会导致轮胎过度磨损。
配置 (b)
前轮由转向电动机旋转并彼此保持平行。后轮由单个牵引电动机以相同的速度驱动。这种“权宜之计”仍可能相当简单并需要较少的电动机,但是具有配置 (a) 的所有缺点,而没有任何优点。转向轮平行意味着有两个 IRC,迫使其中一个或两个轮都滑移。
配置 (c)
前轮由转向电动机旋转,但带有 Ackermann 连杆装置,以确保单个 IRC 的车轮对准。后轮再次由单个牵引电动机驱动,但是要通过一个差速装置,该装置根据转向输入,允许后轮以不同的速度旋转。
真正转向的特点
- 消除所有侧向滑移力。
- 精确和可预测的转向。
- 精确的测距。
- 机械复杂性。
- 最小转向半径大于滑移转向的最小转向半径。
- 如果一个驱动轮离开地面或失去抓地力,差速作用会导致完全失去驱动力。
6 轮到 8 轮
上述原理可应用于具有 6 轮到 8 轮的车辆。对于滑移转向,这不过是增加额外的电动机或驱动联轴器。而为真正转向进行设计时,如果您坚持单牵引电动机模式,那么情况就会变得非常复杂:6 轮或 8 轮车辆通常需要前 4 轮或 6 个轮分别转向,传动系统中的多个差速器会使情况变得更加复杂。军用卡车通常是采用这种方式制造的,因为对于现场的非技术人员来说,机械维修和“修补”要比电子/电气系统更容易。在战时,这些车辆是消耗品,不需要非常长久的可靠性。行星探测器必须采用更简单的机械结构(重量更轻)并且更加可靠(无法进行维修)。
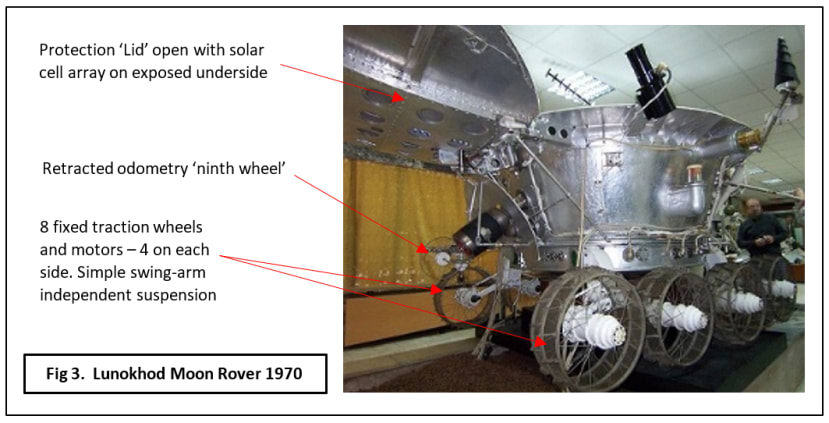
探测器设计者面临重量限制问题有两个原因:重量每增加一克都会增加发射燃料的成本,过大的地面压力会导致车轮沉入松软、多尘的月球或火星表面。重量轻、强度低的结构可以减少第一个问题,而多轮甚至履带可以帮助解决第二个问题。轨道通常被排除在外,因为它需要精确导航,而不需要高速机动性。话虽如此,但第一辆外星探测器 1970 年 11 月登陆月球的月球车 1 号 却拥有 8 轮和滑移转向功能(图 3)。是的,它看起来确实像是采用镀锌锡浴制成的。尽管如此,它还是工作并行驶了超过 6 英里。月球车 2 号在短短四个月内行驶了超过 26 英里。
月球车和火星探测器
月球车探测器有 8 个固定车轮,每个车轮都由自己的电动机驱动。每侧的电动机都以相同的速度运行;滑移转向是通过改变两侧的速度来实现的。从在后面拖行的第九个非驱动脚轮进行测距。这种布置并不令人满意,后来证明行驶距离被低估了一些距离。
直到 1997 年 NASA 探路者任务将 6 轮旅居者号带上在火星上后,才出现了更多的探测器。旅居者号像玩具一样大,只有 65 厘米长、48 厘米宽,是新一代行星着陆器的技术验证机,可以四处移动和探索。此后,2004 年出现了较大的勇气号和机遇号,2012 年则出现了更大的核动力型好奇号(图 4)。好奇号的继任者将于 2020 年着陆。所有这些探测器都共享基于摇臂转向架悬架的相同 6 轮移动系统。
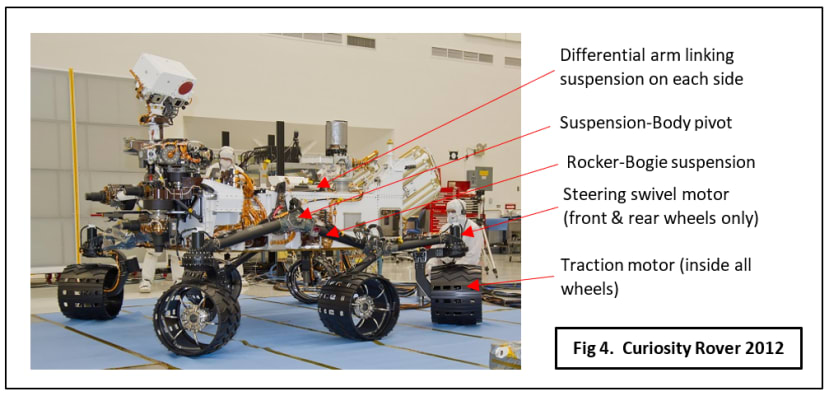
请注意,使用了四个“角”轮进行转向。在这张发射前的照片中,好奇号的车轮被设置为可在原地转向。这款探测器移动系统的局限性在于,电动机控制器不能在转向的同时驱动牵引电动机。每次进行航线调整时都必须停下来,这延缓了进度。在本文撰稿时,好奇号自六年前着陆以来刚行驶了超过 12 英里。与月球车 2 号的行程相比...当然,它们的任务目标有些不同:科学在 1970 年代的冷战中退居二线。创造记录或“成为第一”才是最重要的。苏联输掉了载人登月的竞赛,但它的机器人月球车却拥有最长的行程!好奇号(最初被称为火星科学实验室)需要精确地移动,因为科学数据收集是首要任务。
在 6 轮部分中,还介绍了欧洲天外火星 2020 探测器。可以在本系列第 2 部分的最顶部看看它的图片。车轮布置看起来与 NASA 探测器的车轮布置大致相似,然而实际上却有很大不同。首先,没有摇臂转向架悬架,只有三个两轮转向架,每个都在中心转动。前四个车轮连接到每侧的转向架上;后轮转向架在探测器的背部转动,因此可与其他车轮成直角摆动。与其他火星探测器一样,所有六个车轮上都有牵引电动机。但不同的是,所有车轮都可以转向,允许“螃蟹式”移动并且悬架的“支腿”可以独立地来回摆动,提供“行走”步态。探测器还能同时驱动所有牵引和转向电动机。本文包含更多关于天外火星探测器移动系统的详细信息,目前计划在 2020 年登陆火星。
两轮上的乐趣
我将跳过三轮车,因为它们不适合崎岖的地形,只能在光滑的仓库地板上行驶。两轮车式机器人也是如此,它有一到两个脚轮来保持直立(请参见第 2 部分)。大多数教育、爱好和研究用机器人都使用这种配置,因为它很容易使用。尽管基于差速转向,但它只有一个 IRC,仅通过调整两个轮子的相对速度和旋转方向,即可将运动从直线变为原地旋转。它不适合在火星上使用,但是对于学习和研究却有很大帮助。
悬架
大多数小型商用移动机器人都不具备任何类型的悬架。对于光滑的地板,这样可以,但是对于“越野”呢?汽车通常在每个车轮上都有一个短行程(上下运动)弹簧和减震器,跑车有一个“刚性”设置,允许快速转向,而公路车有一个“柔性”设置,可提供更好的乘坐舒适性。越野车辆具有长行程悬架,可提供更好的底盘高度,以应对崎岖的地形和全轮驱动。行星探测器也需要这些越野功能。月球车的短行程独立悬架更像是公路车的悬架,因为它采用实时遥控设计,可以避开而不是爬过障碍物。正如我之前所述,它是为了在柔软多尘表面上快速行驶而制造的。
火星探测器是为了在坚硬、岩石遍布的地形上行驶而制造的,如果有必要,它可以爬过而不是绕过障碍物(图 5)。这主要是因为,这些探测器的任务目标是到达远离着陆点的预定点,如果必须绕过途中的每块小石头,那么这些任务永远都不会完成。必须设计一种悬架系统,使所有六个轮在任何情况下都能与地面保持紧密接触。

摇臂转向架悬架使好奇号能越过高于车轮直径的障碍物,它没有弹簧,每侧的组件仅在一个枢轴点处从车身上悬挂下来。然而,每一侧并不完全独立于另一侧:横跨车身顶部的是连接两个差速臂的中心枢转水平横杆。这防止了车身在两侧枢轴上随机摆动,还将摇臂的运动从一侧传递到另一侧。当一个前轮爬过岩石时,差速臂向后移动,转动横杆,从而使另一侧的摇臂向下,部分调平车身并增加前轮的地面压力。这种设计的一个有趣之处是,通过先运行转向架可以获得更大的牵引力。我不确定这是偶然发现的还是设计发现的,但是摇臂优先的配置相当谨慎。如果好奇号被困在疏松的表面上,它应该能凭借向后行驶提供的更大牵引力而脱困。本文介绍了基本类似的 MER、勇气号与机遇号的移动系统。
制造您自己的探测器
真正的机器人正变成极其复杂的机器,无论是机械还是电子,都需要更加复杂的编程(编码)来使其执行有用的任务。大多数商业“爱好”移动机器人倾向于采用带有脚轮的两轮车形式或没有明确转向方式的四轮车形式。据我所知,它们都没有悬架系统。童车形式易于从头开始制造,非常适合开发控制软件和测试传感器、导航和通信系统。如果您想要一辆“合适的”火星探测器,一辆微型好奇号,NASA/JPL 已经提供了一整套开源设计包,需要价值 2000 英镑的组件。这对个人而言很昂贵,但对于学院或大学的 STEM 教学来说却是理想的选择。
结论
行星探测器采用坚固可靠的设计,因为按照定义,它们要在未知的恶劣环境中工作,并且无法进行维护。2004 年登陆的 MER 探测器机遇号直到今年(2018 年)6 月仍在运行和收集有用的数据。当一场遮天蔽日的沙尘暴席卷整个星球(这种情况并不罕见),使其太阳能电池板无法获得阳光时,它进入了冬眠模式(希望它会从冬眠模式中苏醒)。那时,它成为行驶距离最长的探测器,行驶了超过 28 英里,打破了月球车的记录。而好奇号采用“核动力”驱动,无论如何都会继续运行。希望“机遇号”可以很快醒来。
如果您暂时想不出做什么,可以关注我在 Twitter 上发布的文章。我会贴出关于新的电子产品和相关技术的文章链接,也会转发我读到的关于机器人、空间探索以及其它话题的文章。