Expériences avec des submersibles
Suivez l'article
 Dave from DesignSpark
Dave from DesignSpark
Que pensez-vous de cet article ? Aidez-nous à vous fournir un meilleur contenu.
Dave from DesignSpark
Merci! Vos commentaires ont été reçus.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
Que pensez-vous de cet article ?
J'ai choisi un thème robotique et décidé d'expérimenter la conception d'un drone caméra submersible.
L'objectif de ce projet était de créer une plate-forme de base pour expérimenter des applications de prospection sous-marine domestiques, commerciales et scientifiques. Ces dernières peuvent aller de l'analyse de l'intégrité de la coque d'un navire de surface, ou d'autres structures sous-marines, à des questions environnementales basiques telles que le contrôle de la santé des populations de poissons et de coraux.

Nomenclature
- 110 m de tuyau de drainage en PVC
- Filament d'impression PLA de 1,75 mm
- Peinture plastique jaune
- Apprêt plastique
- Colliers de serrage de 120 mm (027-7884)
- Pompes en ligne à eau de mer (763-2544)
- Batterie au plomb scellée 12 (537-5450)
- Bornes à vis (choc-block) (813-3123)
- Presse-étoupes M12 IP68 (669-4654)
- Câble à 2 conducteurs (660-4071)
- Câble à 4 conducteurs (660-4037)
- Boutons poussoir à montage sur panneau (014-4432)
- Interrupteur à clé (032-1026)
- Câble à 1 conducteur
- Caméra CCTV avec viseur oculaire (PAL)
- Vis et écrous de blocage M4
- Vis et écrous de blocage M5
- Fenêtre de visualisation en Perspex
- Sertissages de terminaison (613-9930)
- Convertisseur BNC à borne à vis
- Convertisseur BNC à RCA
- Mastic d'étanchéité
Approches du design

Désassemblage 3D
Avec ce projet, mon objectif principal était de m'écarter des grands systèmes commerciaux coûteux utilisés dans les fouilles sous-marines et la récupération des épaves et de me concentrer sur le développement d'un design rentable convenant à un large éventail de tâches plus légères. Pour cela, j'avais l'intention d'utiliser une combinaison de composants commerciaux prêts à l'emploi et de pièces imprimées en 3D pour créer un design innovant et peu coûteux dont je testerais ensuite la conformité à un ensemble d'exigences d'étanchéité et de fonctions de déplacement.
Lors de cette phase de développement, je vais me concentrer sur la création de la coque principale, avec une caméra et des fonctions de mouvement de surface. Les versions ultérieures comprendront des options de contrôle de la profondeur ainsi qu'un châssis électronique interne contenant les cartes de circuit imprimé et les batteries.
Coque principale
Pour respecter le principe de rapport qualité-prix, j'ai utilisé un tuyau de drainage en PVC de 110 mm pour la coque. Le diamètre du tuyau permet l'intégration parfaite de la caméra à viseur oculaire, ainsi que la fixation des composants externes. Les parois épaisses du tuyau lui permettront de résister aux pressions d'une immersion en eau peu profonde, dont il conviendra de tester ultérieurement les limites.
Dans l'esprit des traditions marines, la coque a été peinte en jaune vif, avec plusieurs couches d'apprêt et de peinture plastique pour fournir une bonne couverture et une bonne accroche ; toutes les pièces imprimées en 3D ont été laissées dans leur couleur noire d'origine.

Sous-marin de la classe HMS Vanguard
Ce design s’inspire de l'architecture de sous-marins qui utilisent de l'air comprimé pour contrôler le tangage et la flottabilité générale en le faisant entrer et sortir d'une série de réservoirs. Pour cette version, la coque remplie d'air agit comme une citerne de ballast pour donner une flottabilité maximum au vaisseau. Cependant, la construction d'un système de ballast sur une échelle si réduite est complexe, principalement à cause de la taille des compresseurs d'air du réservoir. Il serait possible de fournir l'air comprimé depuis la surface à l'aide d'un tuyau pneumatique, mais il serait plus pratique de trouver une solution de rechange.
Une méthode courante de contrôle de la profondeur populaire parmi les amateurs de submersibles consiste à utiliser un propulseur vertical pour pousser l'embarcation directement sous l'eau. Cependant, pour que cela soit efficace, le vaisseau doit avoir une flottabilité neutre, obtenue en faisant correspondre la force ascendante de l'air piégé avec une quantité égale de poids de ballast exerçant une force descendante. En pratique, de nombreux submersibles ont une flottabilité légèrement positive qui permet au vaisseau de plonger et de remonter à la surface avec très peu d'effort tout en le laissant aussi remonter progressivement vers la surface s'il rencontre un problème. J'envisagerai d'ajouter ces fonctionnalités à un stade ultérieur.
Cône de protection et support pour la caméra
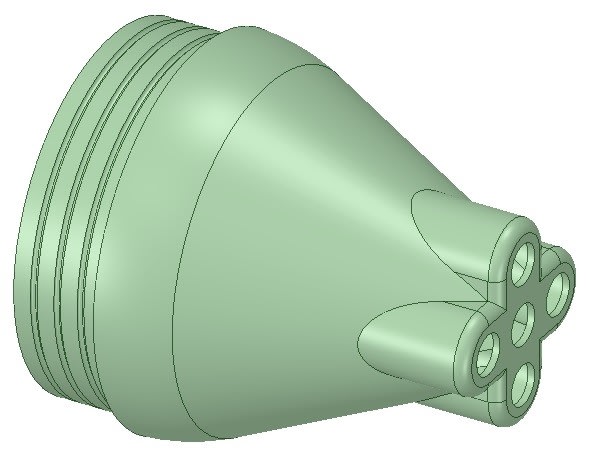
La conception correcte du cône de protection était cruciale, car ce dernier remplit de multiples fonctions, principalement pour empêcher l'eau de pénétrer dans la coque pressurisée, mais aussi pour abriter la caméra de façon fluide et dynamique. Le premier défi lors du montage de la caméra à l'intérieur du cône a consisté à intégrer une fenêtre transparente pour permettre la visibilité sans compromettre l'étanchéité du boîtier et en permettant la résistance à une petite quantité de pression externe.

Modèle CAO du cône de protection
Je me suis donc procuré un disque en Perspex de 4 mm d'épaisseur auprès d'une entreprise de coupe de plastique, en prenant soin de faire correspondre le rayon de la fenêtre à l'ouverture de la caméra. J'ai ensuite pu utiliser les dimensions connues de la fenêtre en Perspex, de la caméra à viseur oculaire et de la coque pour créer un modèle 3D du cône de protection et l'imprimer. J'ai soigneusement appliqué de la colle instantanée sur la lèvre intérieure du cône de protection pour coller la fenêtre de visualisation au modèle imprimé 3D tout en maintenant un joint hermétique. J'ai également veillé à ce que la colle ne dégouline pas sur la fenêtre de visualisation, car toute application de solvants donnerait un aspect embué au plastique.

Assemblage complet cône de protection-caméra
J'ai dû employer des tolérances serrées pour sceller correctement l'ensemble cône de protection-caméra sur la coque. J'ai mesuré le rayon intérieur de la coque et ajouté des rainures concentriques sur le manchon du modèle de cône pour permettre l'ajout ultérieur de joints toriques qui créeraient un joint étanche tout en préservant la possibilité de démonter l'appareil pour toute opération d'entretien requise.
Flux de caméra et moniteur
La caméra a été conçue pour être montée à l'avant de l'appareil afin de donner une vue subjective de l'environnement sous-marin à explorer. À ce stade du développement, le format du signal vidéo était un simple flux analogique (PAL) diffusé par l'intermédiaire d'un câble à deux conducteurs relié par deux convertisseurs BNC-borne à vis et un convertisseur BNC-RCA avant d'être alimenté dans l'écran vidéo. La caméra a produit une image fiable de bonne qualité clairement visible sur l'écran vidéo, même à de faibles niveaux de luminosité (l'un des avantages de l'utilisation d'équipements de vidéosurveillance recyclés).
Cône de queue et collecteur de câble
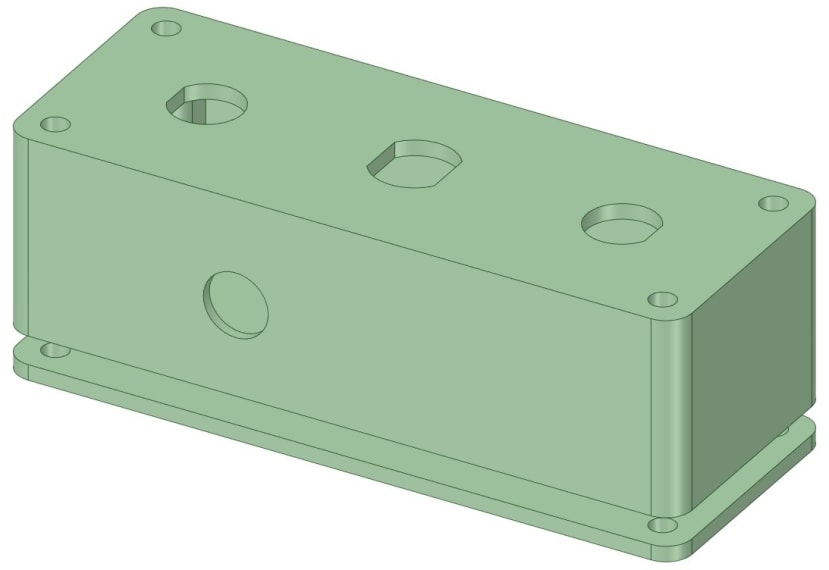
Tout comme le cône de protection, le cône de queue a pour fonction première d'empêcher l'eau de pénétrer dans la coque pressurisée principale, mais il a également été conçu pour agir comme une interface entre les éléments électroniques intérieurs et extérieurs. Pour ce faire, j'ai dû intégrer divers presse-étoupes à norme de protection élevée pour créer un collecteur par lequel pourraient passer les câbles tout en évitant toute pénétration d'eau.
Modèle CAO de cône de queue
L'appareil comprenait cinq câbles distincts au total, servant tous à différentes fonctions y compris le flux de la caméra, les propulseurs gauche et droit, la batterie externe, ainsi que l'attache de télécommande. La présence d'un grand nombre de câbles augmente les risques de fuite au niveau de la coque, je chercherai donc à améliorer cet aspect dans les versions ultérieures.
Supports de propulseur
L'obtention des propulseurs a constitué un défi intéressant, car ils devaient être en ligne avec la coque pour réduire la traînée. A l'origine, je comptais utiliser une série de pompes de cale peu coûteuses, mais leur conception était asymétrique et difficile à monter, ce qui rendait difficile la création d'un design pour le vaisseau. J'ai donc décidé d'utiliser un ensemble de pompes à eau de mer en ligne, et je me suis assuré de trouver une paire qui produirait une poussée raisonnable permettant au vaisseau de se déplacer dans l'eau.
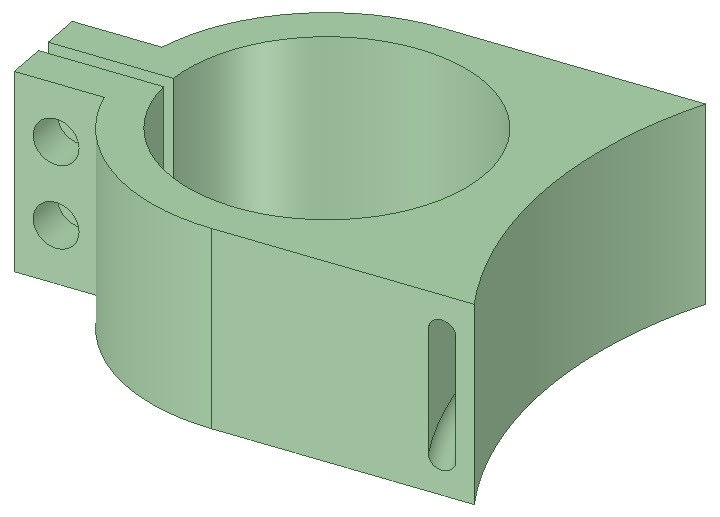
Modèle CAO du support de propulseur
La coque étant ronde et ne présentant aucun emplacement évident pour monter directement les propulseurs, j'ai décidé d'imprimer en 3D un certain nombre de supports et de fixer le tout sur la coque avec un ensemble de colliers de serrage. J'ai utilisé DesignSpark Mechanical pour modéliser et produire les CAO pour mon imprimante, en utilisant un design novateur pour faire passer le collier de serrage dans le support, et en prenant soin de le faire correspondre au profil circulaire de la coque afin de permettre la fixation du propulseur à ras de la coque et en ligne comme prévu.
Supports de batterie
Afin de maximiser la stabilité du vaisseau, j'ai décidé d'abaisser son centre de gravité en plaçant les composants les plus lourds dans la partie inférieure de la coque. Etant donné que le centre de poussée vers le haut (flottabilité) était centré autour de la coque remplie d'air, j'ai décidé de placer la lourde batterie plomb-acide que j'utilisais comme alimentation locale sous la la coque pour former une quille improvisée. Cela contribuerait à assurer la stabilité maximale du vaisseau même dans les environnements océaniques rudes.

Modèle CAO du support de batterie
En m'appuyant sur les dimensions de la batterie pour modéliser un support de serrage à l'aide de DesignSpark Mechanical, j'ai été en mesure de reproduire le design des supports de propulseur et d'utiliser les colliers de serrage pour fixer la batterie sous la coque.
Télécommande
Le fonctionnement des submersibles téléguidés présente un besoin unique de connexion câblée avec l'opérateur ; cela est dû aux grandes ondes électromagnétiques d'atténuation du signal auxquelles ils font face lors de leur déplacement dans l'eau et en raison desquelles ils ont besoin d'une connexion câblée pour l'exploration à toute profondeur.
Modèle CAO de télécommande
La télécommande utilisée dans cette expérience était très grossière, elle employait deux boutons poussoirs pour activer les propulseurs gauche et droit respectivement. J'ai utilisé une longueur de câble à quatre conducteurs pour réaliser ces connexions directement sur les propulseurs avec un conducteur pour chaque propulseur, un pour l'alimentation et un conducteur commun relié à l'interrupteur pour activer et désactiver le tout.

Assemblage complet de la télécommande
Bien que je n'aie utilisé qu'une longueur de câble de deux mètres pour la construction initiale, il sera nécessaire de l'étendre pour explorer davantage dans les milieux marins réels. Un bus de communication série plus fiable tel que RS485 sera également adopté afin de mieux contrôler le mouvement et la télémétrie du vaisseau, tout en utilisant moins de câble.
Test en baignoire
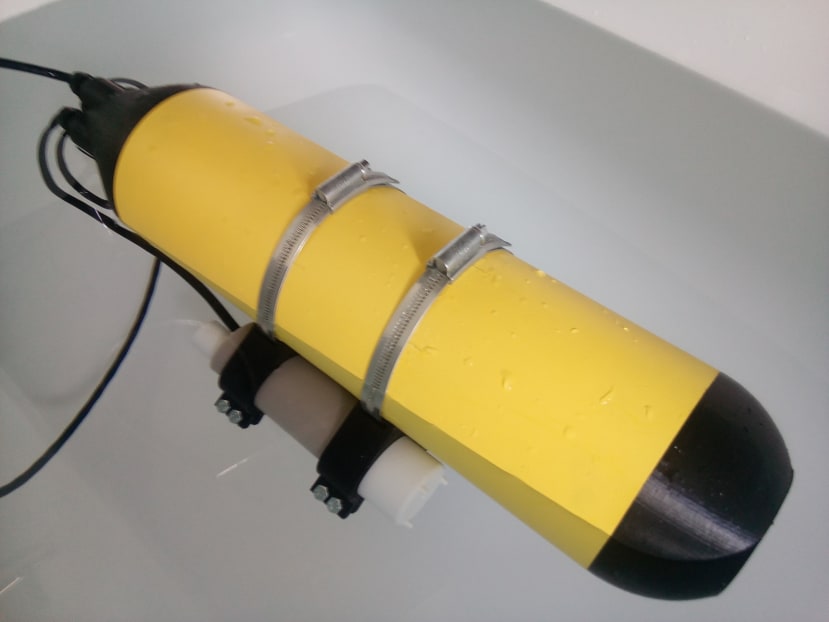
La création d'un submersible miniature ne serait pas complète sans l'incontournable test en baignoire ; l'eau calme de la baignoire constituait un environnement contrôlé acceptable pour tester précisément mes idées de design. Comme vous pouvez le voir, la flottabilité est largement suffisante pour assurer que le vaisseau reste en surface, et la quille improvisée abaisse le centre de gravité du vaisseau pour une stabilité maximum.
Il est à noter que le vaisseau tangue légèrement vers l'avant en raison du poids de la caméra, mais ceci peut facilement être réglé en déplaçant la quille vers l'arrière à l'aide des colliers de serrage et en équilibrant le tout. Idéalement, cette caractéristique pourrait être mise à profit ultérieurement grâce à l'utilisation intentionnelle d'un système de ballast mobile permettant de modifier dynamiquement l'angle de tangage du vaisseau en fonctionnement.

Le test d'immersion initial a été relativement positif : aucune bulle d'air ne s'échappait de la coque et même après avoir constaté plus tard que la coque contenait une faible quantité d'eau, tout a bien fonctionné pour un premier essai. C'est un bon début, qui devra encore être mis au point avant tout test en conditions maritimes réelles.
Conclusions
En dépit de la complexité de la construction et du délai d'un mois que je m'étais donné, le projet s'est révélé être une réussite et j'ai beaucoup appris sur l'attention aux détails requise lors de la construction de systèmes de ce type. L'utilisation de matériaux imprimés en 3D dans ce projet a également produit d'excellents résultats et constituera un fil conducteur lors de ma prochaine construction. La forte demande de modélisation 3D de ce projet a exigé que je me familiarise davantage avec le logiciel de CAO DesignSpark Mechanical. Cela a largement simplifié mes efforts de conception du projet, en particulier pour l'exportation pour l'impression 3D, et je recommanderai à tous ceux qui souhaitent se lancer dans un projet similaire de faire de même.
Maintenant que la création initiale est terminée et que j'en ai tiré les leçons, je souhaite vivement développer le projet pour en faire une plate-forme fonctionnelle destinée à des applications réelles pratiques.