Experiments with Submersibles
Follow article
 Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
In the lead-up to the 2019 BrightSparks Awards, I thought I would try building something a bit different to bring to the event this year. As I was bringing ‘Rover’ along again in my oversized suitcase, I thought I would stick with the robotics theme and experiment with the design of a submersible camera drone.
The objective of this project was to create a base platform to experiment with domestic, commercial and scientific subsea surveying applications. This could include anything from scanning surface vessel hull integrity and other underwater structures to basic environmental concerns by checking the health of fish and coral populations.

Bill of materials
- PVC 110m drainage pipe
- PLA 1.75mm print filament
- Yellow plastic paint
- Plastic primer paint
- 120mm hose clips (027-7884)
- Inline sea-water pumps (763-2544)
- Sealed 12v lead-acid battery (537-5450)
- Screw terminals (choc-block) (813-3123)
- M12 IP68 cable glands (669-4654)
- 2-core cable (660-4071)
- 4-core cable (660-4037)
- Panel mount push buttons (014-4432)
- Key-switch (032-1026)
- Single core wire
- CCTV eyeball camera (PAL)
- M4 screws and locking nuts
- M5 screws and locking nuts
- Perspex viewing window
- Terminal crimps (613-9930)
- BNC to screw terminal converter
- BNC to RCA converter
- Sealing putty
Design Mentalities

3D Disassembly
My main objective for this project was to diversify away from the big expensive commercial systems used in deep-sea excavations and wreck-salvaging and instead focus on developing a cost-effective design suited for a wide range of light-duty tasks. To achieve this, I would aim to use a mix of commercial of the shelf (COTS) components and 3D printed parts to fabricate a novel low-cost design and test against a set of requirements for basic waterproofing and movement functions.
For this stage of development, I will focus on creating the main hull with a basic camera feed and surface movement capabilities. Later iterations will include allocations for depth control and an internal electronic chassis to hold the circuit boards and batteries internally.
Main Hull
In sticking with the cost-effective theme, the main hull of the vessel was made from a piece of 110mm PVC drainage pipe. The diameter of the pipe was perfect for embedding the camera eye as well as mounting any external components. The thick walls of the pipe will allow it to withstand pressures from shallow water submersion, the limits of which will be important to test later on.
The hull was painted in a typical seafaring livery of bright yellow, using several coats of plastic primer and paint to give a thorough coverage and good stick, with any 3D printed parts being left in their natural black colour.

HMS Vanguard Class Submarine
The influence behind this design was taken from the architecture of submarines that use compressed air to control the pitch and overall buoyancy by forcing it in and out of a series of ballast tanks. For this build, the air-filled hull is acting as the hypothetical ballast tank, giving the craft maximum buoyancy. However, building a ballast tank system on such a small scale is a big challenge, primarily due to the size of available reservoir air compressors and while it would be possible to supply compressed air from the surface using a pneumatic hose, it is more practical to look for an alternative arrangement.
A more common method of depth control that is popular amongst submersible enthusiasts is to use a vertical thruster to directly push the craft underwater. In order to do this effectively however, the craft needs to be made neutrally buoyant by matching the upwards force of any trapped air with an equal amount of ballast weight pushing it down. In practice, many submersibles actually exert a slightly positive buoyancy which still allows the craft to dive and surface with very little effort but also enables it to gradually float to the surface if it experiences a fault. I will look to add these features in later developments.
Nose Cone and Camera Mount
The nose cone was important to design correctly as it serves multiple functions, primarily to keep water out of the main pressure hull but also to house the camera in a fluidly dynamic fashion. The first challenge when mounting the camera inside the cone was integrating a transparent window to enable visibility without compromising the water-tight enclosure and still be able to withstand a light amount of external pressure.

Nose Cone CAD Model
To do this I procured a 4mm thick Perspex disk from a plastic cutting company, taking care to match the window radius to the camera aperture. I could then use the known dimensions of the Perspex window, camera eyeball and the hull in order to 3D model and print the nose cone. By carefully applying superglue to the inner lip of the nose cone, the viewing window could be bonded to the 3D printed model while maintaining a hermetic seal. It was also important to ensure the glue did not splash onto the viewing window as any removal solvents would fog the plastic.

Nose Cone Camera Full Assembly
Tolerances had to be tight in order to properly seal the nose cone assembly tightly against the hull. By measuring the inner radius of the hull and adding concentric grooves to the sleeve of the nose cone model allowed for the later addition of O-rings to create a watertight seal while maintaining the ability to disassemble the craft for any maintenance.
Camera Feed and Monitor
The camera was designed to be mounted at the front of the craft to give a first-person view of any underwater environments that need exploring. The format of the video signal at this stage in development was a simple analogue feed (PAL) that was broadcast through a two-core cable connected by two BNC to screw terminal converters and a BNC to RCA converter before being fed into the video monitor. The camera gave a reliable and good quality image that could be seen clearly on the video screen even at low light levels, a benefit of using recycled CCTV equipment.
Tail Cone and Cable Manifold
In much the same way as the nose cone, the tail cone’s primary function is to keep water out of the main pressure hull but was also designed to act as an interface between the inner and outer electronics. To do this I needed to house a number of high ingress rated cable glands in order to create a manifold into which the cables could enter while keeping the water out.
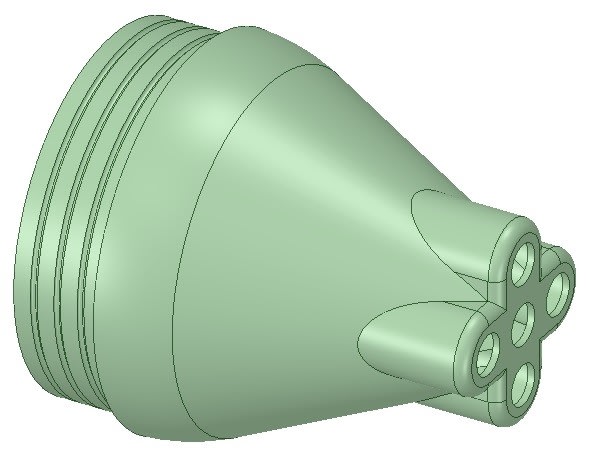
Tail Cone CAD Model
There were five separate cables in total, all serving different functions including the camera feed, left and right thrusters, external battery as well as the remote-control tether. Having a high number of cables increases the chances of hull leakage and therefore I will be looking to improve this in later versions.
Thruster Brackets
The procurement of the thrusters was an interesting challenge as they needed to be inline with the hull to reduce drag. Originally, I was planning to use a series of low-cost bilge pumps but their design was impractically asymmetric and difficult to mount, making it hard to realise a design for the craft. I, therefore, decided to use a set of inline seawater pumps, making sure to find a pair that would produce a reasonable thrust for the craft to push itself through the water.
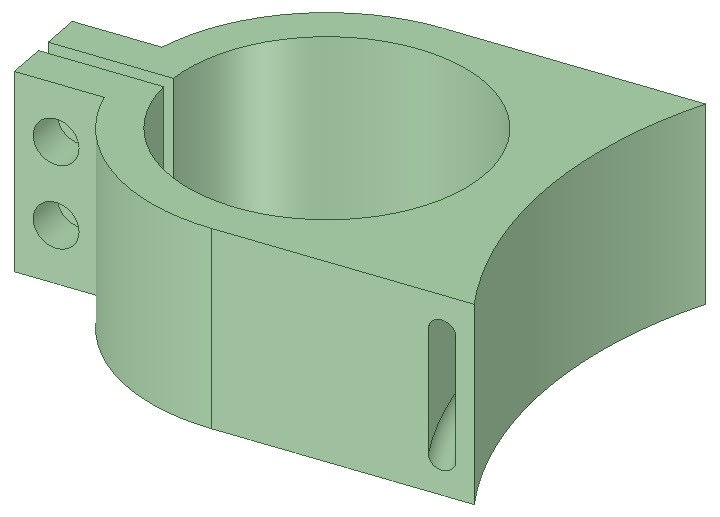
Thruster Bracket CAD Model
With the hull being round and having no obvious way to directly mount the thrusters, I decided to 3D print a number of brackets and attach the assembly to the hull with a set of hose clips. I used DesignSpark Mechanical to model and produce the CAD files for my printer, using a novel design to thread the hose clip through the bracket, taking care to match the circular profile of the hull which enabled the thruster to be fixed flush against and in line with the hull as planned.
Battery Brackets
In order to maximise the stability of the craft, I decided to lower the centre of gravity by placing the heaviest components at the bottom of the hull. Seeing as the centre of upwards thrust (buoyancy) was centred around the air-filled hull, I decided to take the heavy sealed lead acid battery I was using as a local power supply and mount it underneath the hull as a makeshift keel. This would help the craft stay maximally stable even through demanding ocean environments.

Battery Bracket CAD Model
By taking the dimensions of the battery and using DesignSpark Mechanical to model a clamping bracket, I was able to mirror the design of the thruster brackets and use the hose clips to secure it underneath the hull.
Remote Control
Remote submersibles are unique in their need of a wired connection to the operator in order to function. This is due to the large signal attenuation electromagnetic waves they experience as they move through water, and therefore a wired connection is needed to explore at any depth.
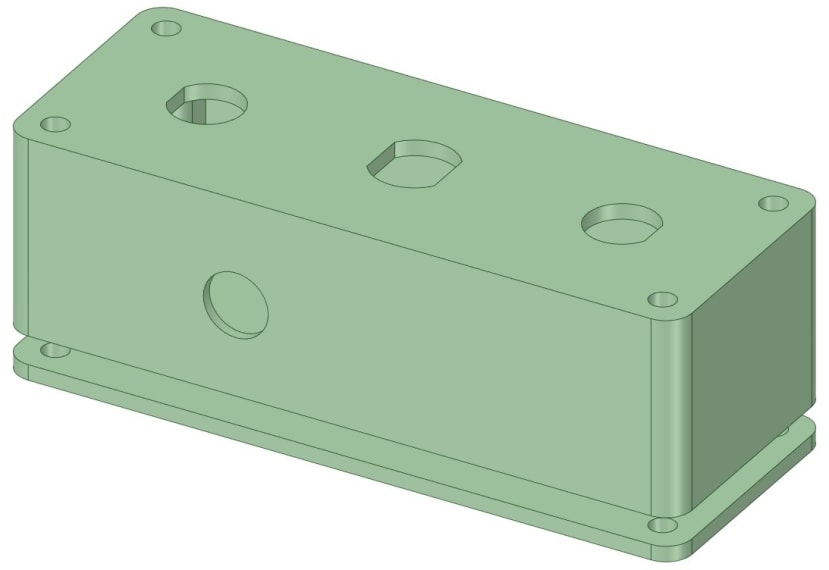
Remote Control CAD Model
The remote control used in this experiment was very crude, using two push buttons to active the left and right thrusters respectively. A piece of four core cable was used to make these connections directly to the thrusters with one core for each thruster, one for the power supply and a common connected to the key switch to turn everything on and off.

Remote Control Full Assembly
While I only used a two-meter piece of cable for the initial build, this will need extending to explore further in real ocean environments. A more reliable serial communication bus will also be adopted such as RS485 in order to more accurately control the movement and telemetry of the craft while using less cable.
Bathtub Testing
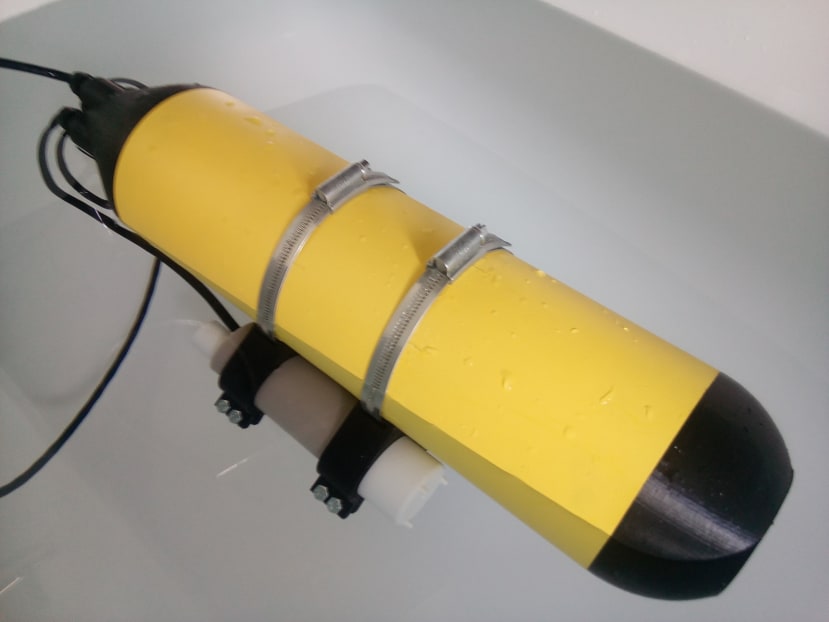
The build of a miniature submersible would not be complete without the obligatory bathtub test, with the still water in the tub making for a decent controlled environment where I could test my design theories accurately. As can be seen, there is plenty of buoyancy to keep the craft surfaced with the makeshift keel lowering the centre of gravity to make it maximally stable.
It is interesting to note that the craft is pitching slightly forward due to the weight of the camera which can be easily adjusted by moving the keel towards the stern using the hose clips and balancing it out. Conveniently, this fault could actually be useful later on by intentionally employing a moving ballast system to dynamically alter the pitch angle of the craft while in use.

The initial submersion test was reasonably successful with no air bubbles coming from the hull and although there was a minor amount of water in the hull upon later inspection, it performed very well for a first test. A good start, but this will need to be perfected before any proper sea-trials.
Conclusions
Despite the complexities of the build and the month deadline I gave myself before BrightSparks this year, the project has proven very successful and I have learned a lot about the attention to detail required when building these systems. The use of 3D printed materials in this project has also shown excellent results and will continue to be a running theme into my next build. The high demand for 3D modelling in this project has required me to further familiarise myself with the DesignSpark Mechanical CAD software. In doing so has made my design work very easy especially when exporting for 3D printing and I would recommend anyone attempting a similar project to give it a go.
With the initial build complete and lessons learned, I am very keen to now develop the project into a functional platform for practical, real-world applications. As such I am looking forward to hearing everyone’s feedback regarding what I could do better, what direction I should take with it next and if you have a problem that needs solving with underwater robotics?
Let me know down below.