EMG Sensor Armband
Follow article Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
By Yat Tung Ken, YUEN
This project is to build a robot arm by using an EMG (electromyography) muscle sensor. An EMG signal is easily affected by the environment, like switching on a power supply. The team shows an EMG signal can be measured and identified properly. In Figure.1, two frequency spectrums at 200 Hz and 50 Hz can be identified. The team can use it to move a robot’s finger (see Figure.2).
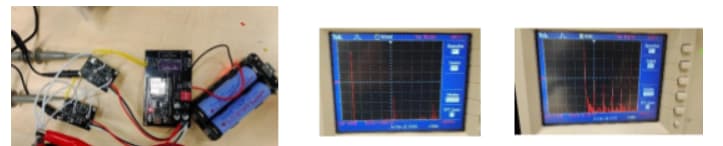
Figure. 1
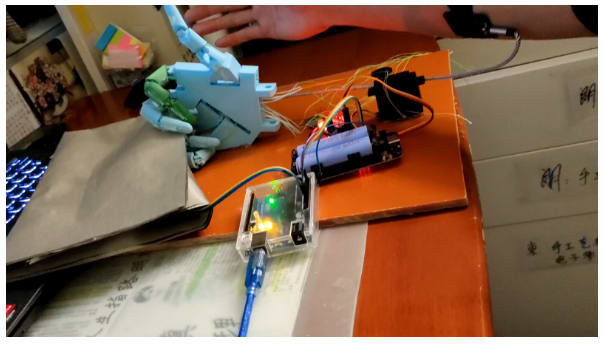
Figure. 2
The demonstration video is shown below.
Comment by judges: The demonstration and the overall design are too simple. Moreover, the identification is unreliable. The team should make use of more sensors for different muscles or/and develop some analytical models to extract the EMG signals more properly.