Student Project Competition: Design and Simulation of a Mars Planetary Rover for Cave Exploration
Follow article Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
Project Inspiration
The need for humanity to expand civilization to mars has yielded the need for innovation. The challenges that humanity faces habituating Mars are substantial and abundant, from hazardous radiation to the unforgiving lack of atmosphere. This project looked to propose a potential Mars Rover design for the investigation of caves on Mars, a natural shelter possessing the ability to catalyze the process of establishing a dependable and prosperous building foundation capable of withstanding the demanding requirements of the Martian planet.
The Final Simulation Design
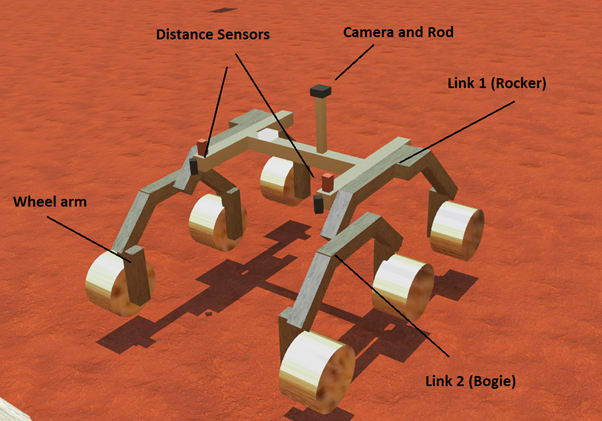
The suspension of choice is a Rocker Bogie Suspension mechanism, consisting of a Rocker arm which connects to the main chassis body, and which on one end connects to the front wheel of the Rover, connects to a second arm link, called a Bogie, which acts as a pivoting mechanism to allow for traversing up obstacles and varying gradients (also housing the back two wheels).
The Software used to create the Simulation design was Webots, which allowed for the creation of the rigid body of the Rover in conjunction with wheel motors and hinge joints to replicate the expected physics. In addition to this, the Rover was programmed with Python, which allowed for the utilisation of components/features on the Rover. These include:
Wheel motors, steering motors, distance sensors, light sensor and spotlights, and an onboard camera with a motor. An annotated final concept design is shown below:
The Rover was tested in a multitude of scenarios, such as incline tests setup through a basic Ramp, to one and two-legged rock traversing tests. The final test looked to test all aspects of the Rover, this test involving a simulation environment of an example Martian Surface, with uneven terrain and a multitude of rocks, in combination with an open faced Cave. The Rover was to traverse successfully over the uneven terrain and to then utilise its distance sensors in combination with its wheel motors to successfully enter the cave, capture footage around the cave utilising the onboard camera and then safely exit the cave. The final simulation environment is shown below:

The code snippets below along with the respective comments depict how the Logic of the Rover is set up and how it not only moves but responds to changes in the environment around it. All of the components on the Rovers such as the motors and distance sensors first have to be set up and then can be controlled on a set of logic statements. 3 movement options were made available to the Rover, to go straight and then either left or right. If the measured proximity values from the 4 distance sensors reached a critical value, the steering and wheel motors would respond by avoiding the detected obstacle by travelling in the opposite direction. Manual control of the camera was also set up, allowing a full 360-degree view around the Rover, and a sectioned out code depicts how the light sensor would also be set up to collect light values to decide when the Rover spotlights need to be activated (Primarily to assist with image capture in low light areas - specifically caves).




The following screenshot shows the camera capability when detecting obstacles of interest:
The Final Test
The following screenshots show how the Rover performed on its Final Test run.
The Rover was able to successfully traverse the Rock cluster and use its distance sensors to enter in and out of the cave, using the Camera to highlight objects for ease of reference. Manual activation of the Rover lights was performed due to Simulation limitations (Although the relevant code for autonomous activation was provided), therefore fulfilling the project aims.
The Final CAD Design
Using Autodesk inventor, a Final Design was achieved, as depicted in the Figure below. The Rover is predominantly made up of Aluminium 6082 for its strong material properties in conjunction with its lightweight. The Rover utilises 6 DC Motors which fit into the L Shaped wheel arms, which are attached to a rigid steel shaft that allows for wheel rotation. The top of these shafts houses a servo coupling which allows for the connection of a Servo Motor to provide steering torque. Numerous pillow block bearings and shaft collars are used on the Rover to both secure and supply smooth motion to the shafts.
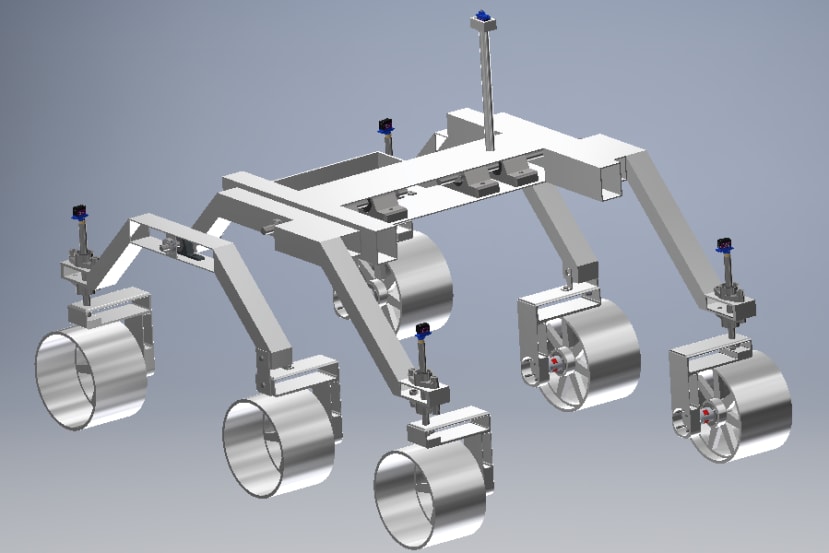
The rough dimensions of the Rover are 1.3m x 0.87m x 0.57m with a wheel diameter of 0.2m (130cm x 87cm x 57cm). The final mass of the Rover is an estimated 45.8kg, not including the additional weight of batteries. The wheel assembly consists of a central shaft, shaft collar, wheel hub, bearing and bearing retaining ring. A closer look at the wheel assembly and its components can be observed below:

Conclusion
Overall, the Rover set out to achieve obstacle traversion and cave navigation. The final Rover test and the additional small traversing tests verified that the Rover accomplished its aims reasonably well. The main learning outcome from the project was a great improvement in both my 3D CAD and python programming skills, with the frequent revisions and design decisions allowing me to pursue a larger project in the future.
The current design can be improved, by looking to implement onboard tools such as a mass spectrometer for chemical analysis of Martian matter in combination with an onboard drill. Further efforts can also be made to improve the structural integrity of the Rover, such as securing the servo motors to the main motor frame, and extra measures to ensure component protection on the surface of Mars, such as dust covers.
Thank you for reading!