
 Dave from DesignSpark
Dave from DesignSpark
こちらの記事について、内容・翻訳・視点・長さなど、皆様のご意見をお送りください。今後の記事製作の参考にしたいと思います。
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
こちらの記事の感想をお聞かせください。
数年前、ドイツのKunbus社で働いていた頃、同社のRevolution Pi製品(ラズパイ搭載産業向けモジュール)のデモ展示品を開発する必要があった。私達は、色の付いた液体(オイルと水)を容器の中でただ循環させるだけの、特に意味のない「無駄システム」をRevPi Coreの制御で開発することにした。そしてそのデモのお披露目、ニュルンベルクの「SPS IPC Drives」展示会でのこと、我々の開発したデモシステムは、Kunbusの(当時の)大手代理店のブースを油まみれにしてしまうという大失敗に終わってしまった。
間違うのが人間、そしてそれを許すのが神の御心である。そういえば、そろそろ次の展示会のDesignSparkブース向けにあの「無駄システム」の2号機(別名「UM2」)を作る時期であることを思い出した。今回もその名が示すように特に役に立たない。ただ、来場する技術者の目を惹き、かつITと制御のクロスオーバー(「Classical Automation enters Alien World of IT (古典的オートメーションがITの異世界に)」参照)、つまりバルブとポンプの古典的オートメーションと現代のITテクノロジーの絶妙なコンビネーションをデモすることだ。USBカメラからの画像信号を唯一の入力とし、Pythonライブラリ(「OpenCV」など)を使った画像解析で液量検出を行い、バルブやポンプを自動制御させて液量のバランスを自動制御するというものだ。(「PYTHON – Let the „Monty-language” enter Automation (PYTHON – 「モンティ言語」をオートメーションに)」参照)。
ミュンヘンで開催されたElectronicaにて展示の「無駄システム UM1号」
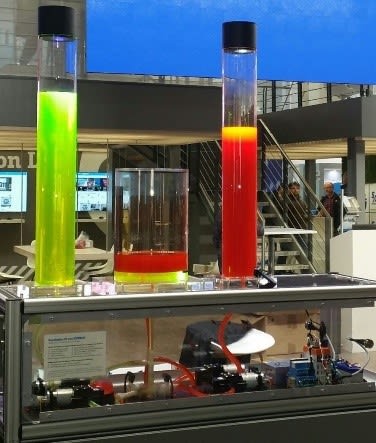
英国WNIE展示会でデモした「無駄システム UM2号」

さて、この無駄システム、いったい何をしているか見てみよう。
左側のシリンダには緑色の水、右側のシリンダには赤いオイルが入っている。どちらの液体もタンクから中央のシリンダにポンプで送り込まれている。中央のシリンダでは両方が混入するが、当然、赤いオイルは緑の水とは交わらず、その上に浮きあがり、結果、赤と緑を再び分離する。そして最後にそれぞれの液体を元のシリンダにポンプで送り返す。
その概略は以下の通りだ。
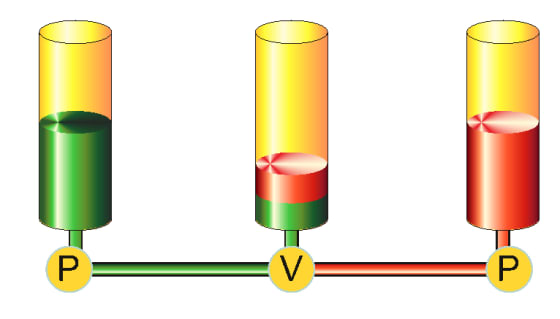
しかし、この概略図のままでは、何回か動作させただけで、どちらの液体も純度が大幅に下がってしまう。ウォーターポンプ「V」が吸い込むと、水とオイルの間の液面が変形して漏斗状になり、バルブ「V」を左の水管から右のオイル管に切り替える正確なポイントがなくなる。そして一度赤いオイルが左の容器に入ってしまえば、左側の緑の水の上に浮き上がってしまうので、赤のシリンダ側に戻すことは不可能になる。したがって、この水位の不確かさを補償する手段が必要だ。バルブを切り替えても片方の水が混入しないような安全な仕組みが必要だ。
そこで、中央の容器に出口を2つ付けること試みた。
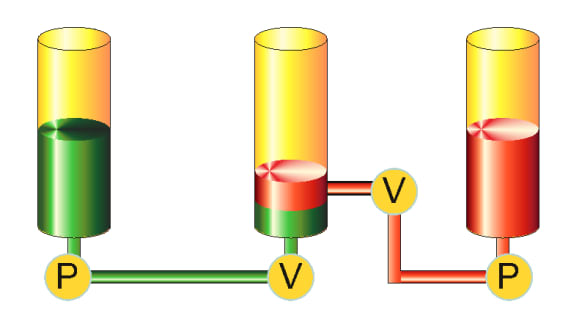
シリンダVの下の出口を使用して、緑の水の水位が確実に上側の(オイルの)出口より下になるまで緑の水を吸い出す必要がある。そして、上側の出口から安全にオイルを吸い出せるようになる。2つのバルブによって2つの液体セクションに差圧は一切発生しない。オイルの出口が小さ過ぎると、オイルの表面張力と粘着力次第で、赤いオイルがバルブと出口の間の管に残ってしまうことがある。そうでなければ、水位が出口より上になったときに、重力が水をオイル管に押し込み、オイルは水の上に浮き上がる。
最終的なセットアップでは、私が使用したポンプは送液方向を反転できなかったため、ポンプとバルブを各側に2つずつ使用した。片側のポンプとバルブは中央の容器を満たすことを目的としており、もう一方の側のポンプとバルブは中央の容器を空にするためのものだ。コントローラは、全部で4つのポンプと4つのバルブの切り替えを制御する必要がある。
機械のセットアップに理想的な部品を見つけられたのはラッキーだった。Alphacoolの水冷機器を使った「ケース改造」シーンに今回のような構成向けのすべての送液部品(管・タンク・継手・ポンプ・バルブ)が揃っていたのだ。Alphacoolは一流のパソコン冷却機器メーカーの1つだ。同社の素材は見栄えを意識して設計され、人目を引き付ける展示品として使用できる。また同社は管・タンク・ポンプ用のLED照明も扱っている。そこで、私は同社のテクノロジーを採用することを決め、大量のRevPi制御LEDも追加することにした。AlphacoolとKunbusのマーケティングチームに心より感謝申し上げる。両社には、UM2のスポンサーとして、関連素材をすべて提供していただいた。

サーバーを冷却する必要がある場合は、AlphacoolのWebサイトを確認してほしい。トップクラスのオールインワンソリューションを取り扱っている(ビットコイン採掘専用ではない)。
どの素材で機械が作れるかを把握してから、DSMで3Dモデルを作成した(この記事の最後にファイルがある)。AlphacoolとKunbusがそれぞれの製品のSTPモデルを提供してくださったので、精密な寸法のリアルな図面を描くことができた。
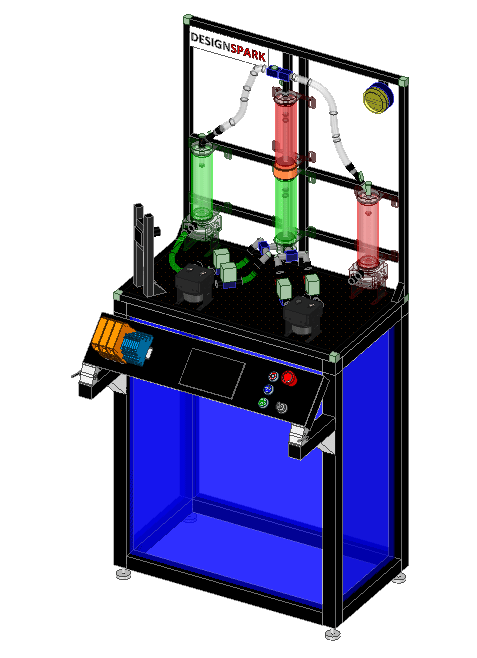
重要な部品の1つが、40mmアルミストラット製ベースフレームワークと傾斜可能なダッシュボードだ。調整式の脚付きで自立する構造だ。伸縮性のあるリップをプロファイルの溝に押し込んである(左下の写真で木片を使って示している)。リップはのちにベースを囲むアルミDibondパネルを支えることになる。ダッシュボードホルダにはクラップレバーを使用し、任意の角度で固定できるようになっている。下の写真で、この部分がどのようになっているかを確認できる。

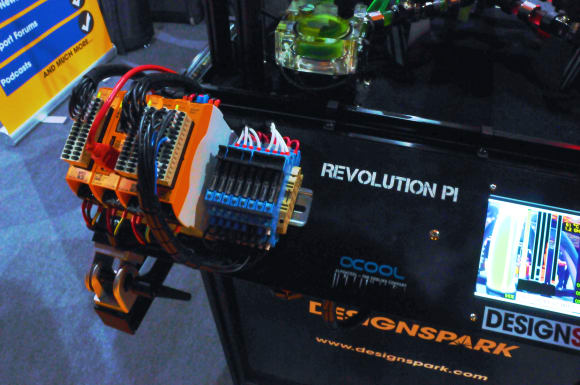
ダッシュボードは3mm厚のアルミ板製だ。業務用の看板メーカーで簡単に印刷して切り出した。ダッシュボードにはDINレールを取り付け、そこにRevPi core 3+ 1台、RevPiデジタル出力(DO)モジュール2個(PWM出力チャンネル合計32本、派手なLEDライトショーに使用)、デジタル入力/出力(DIO)混在モジュール1個(4つのポンプ、4つのバルブ、3つの照光型スイッチ、キースイッチに使用)を取り付ける。このDINレールには、さらにポンプとバルブ用にFinderリレー8個を搭載する。これはポンプとバルブの突入電流(電源投入時)が、RevPi DOモジュールの最大出力電流の500mAを超える可能性があるためだ。
各モジュールの緑/黄色のFEワイヤに注意してほしい。設備のFEピンを空けたままにしているお客様をよく見かけるが、「FE」は「functional earth (機能的アース)」を意味し、「protective earth (保護アース)」(PE)とは何の関係もない。FEは強力なEMIパルスをモジュールから外に流す唯一の手段だ。したがって、このワイヤを接続しないと、内部EMI保護がほぼない状態になる。お使いの設備でFEが使えない場合(この目的で230VコンセントのPEピンを使用しても構わない)、少なくともすべてのFEピンを中央GNDに接続する。私の場合は、DINレールのアースクランプ(シャーシのGND)に取り付け、バッテリー駆動用の12Vマイナス電源にも接続した。見本市の展示品の場合は他の選択肢がないことも多々あるが、固定設置して使う場合は、SELV電源を使用している場合でも、私なら必ずPEのシャーシへの接続を試みる。その場合は、マイナス12Vをフレームに接続しないようにする。

7インチHDMI TFTディスプレイ(Waveshare)と非常停止ボタンもある。接続には、クワドロコプターカメラで標準となっており、数種類の長さから選択できるHDMIフラットケーブルを使用した。
3ポジションのキースイッチは、「Setup (セットアップ)」、「Normal (ノーマル)」、「Auto (オート)」の3種類の動作モードに対応している。ノーマルモードでは、ポンプサイクル1回を実行するために毎回緑の「Start (スタート)」ボタンを押す必要がある。オートモードでは、システムによって1日中サイクルが継続される。セットアップモードでは、オペレータがopenCV画像分析の複数のパラメーターを設定して、システムをさまざまな周囲照明条件に合わせて調整できる。

現在のポンプサイクルを中断する赤い「Stop (停止)」ボタンもある。中断した後は、青い「Reset (リセット)」ボタンを押して、システムを始動条件にリセットする必要がある。システムステートで認識中のボタンはバックライトが点滅する。
下図は最終的なダッシュボードの写真だ。

IOはすべて、ダッシュボード裏側の大型DINレールクランプアレイに配線した。フロントパネルの裏側には小型のアクティブUSBハブも取り付けられている(左下の写真)。IoTのWifiトランシーバ、Logitechワイヤレスキーボード/マウスコンボ用のトランシーバ(セットアップ目的でのみ使用)、USBカメラとディスプレイはすべてこのハブによって駆動する。システム全体はケース改造シーンの電圧と同じ12Vで動作(Revolution Piは12~24Vの電源に対応)。小型の12~5V DC-DCコンバータがUSBハブの電源電圧を生成する。
LED・バルブ・ポンプは、機械の2つの部分を分割できなくなる可能性があるため、クランプアレイに直接接続していない。接続にはネオンカラー4色のパソコンコネクタを使用し、分割できるようにした。

このような役に立たないエンジニアリングにワクワクしてしまう方は、パート2にご注目ください。上部フレームワークの詳細と、RevPi Coreの準備方法について説明する。