射撃ゲーム
この記事を購読 Dave from DesignSpark
Dave from DesignSpark
こちらの記事について、内容・翻訳・視点・長さなど、皆様のご意見をお送りください。今後の記事製作の参考にしたいと思います。
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
こちらの記事の感想をお聞かせください。
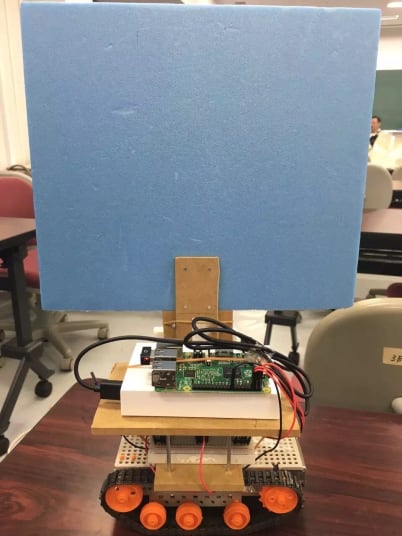
設計と実装の概要
このアプリを作成するために、RasberryPi, Nexus 7, 模型車,I2Cモータドライバー,I2C液晶,マイクロスイッチを使いました。RasberryPi側で、ブレッドボードの上に回路を組み、二つのモータードライバーを使ってI2Cデバイスを制御し,PYTHONでRasberryPi 側の制御コードを書きます。最後、PYTHONサーバが制御インタフェースを提供しています。その一方、Android側には、Startボタンを設置します。このボタン押すと、時限機能が始まり、模型車を動けます。前進する方向がAndroid側で遠隔に制御できます。一分間の制限の中で、標的に当たったら、得点が計算できます。
次に、RasberryPiの中で、制御サービスとWEBサービスに分けています。この板が倒れるとマイクロスイッチを入れ、スイッチがONの状態になって、Countに1をたします。無線ルーターとWEBサービスを連携し、HTTPサーバにアクセスするアプリを作成します。アプリがAndroid端末で運用します。
具体的な機能は以下に述べます。
1)手作り模型車の上に標的が付けられ、Android側のコントロールにより、タンクを動かせます。
2)移動中の目標に射撃したところ、取った点数が液晶モジュールで表示されることができます。