
 Dave from DesignSpark
Dave from DesignSpark
こちらの記事について、内容・翻訳・視点・長さなど、皆様のご意見をお送りください。今後の記事製作の参考にしたいと思います。
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
こちらの記事の感想をお聞かせください。
DesignSparkには、Arduinoロボットキットである「Braccio Tinkerkit」に関する記事がいくつか投稿されている。BraccioをArduinoで制御することは、もっとも手軽に(しかも非常に楽しく)ロボティクスに触れる方法である。この記事では、私がBraccio Tinkerkitを使ってこちらの動画を作成した時の作成手順を書き留めておきたい。この日初めてBraccioを触った私は、たった1日でここまでの事ができたのである。
Braccio Tinkerkit、大地に立つ…

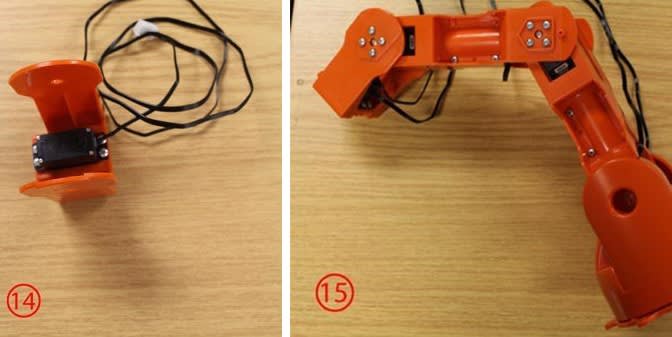
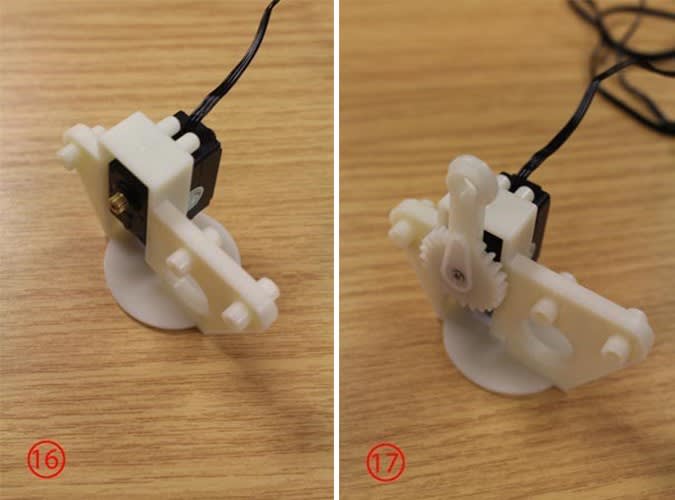
Braccio Tinkerkitのボックスを開くと、ボックスの中からはきれいに並んだパーツが現れた。その光景は、その後の数時間に渡る組み立ての楽しみを予感させてくれるものだった。それはあたかも幼い頃にクリスマスでもらったプレゼントの包みの中からガンプラが表れた時の心境に似ているかもしれない。私たちは、まず夢中でマニュアル通りにガンプラを組み立て、その後マニュアルを無視して、オリジナルのモビルスーツや機械装置のようなものを組み立てたりしたものだ。
今回のBraccioの手順を説明するにあたり、ガンプラの組み立て手順書のように紹介してみる。











口で言うだけなら簡単だ。コードを見せろ。(Linus Torvalds氏の名言集より)
もちろんBraccioの肝はプログラミングだ。プログラミングで動作させなければ、ただのオレンジ色の置物でしかない。Braccioの一番の特徴はArduinoIDEでプログラミング可能な点である。プログラムにおける最もやっかいな部分、例えば細かい組込みコーディングやラダーなどを習得する必要はない。それらは既にハードウェアに精通した人たちが対処しており、我々はそのライブラリを使用するだけである。
つまり、私たちがBraccioに何かをさせるのに必要なことは、ロボットに取らせたい各体勢の関節角度の組を与える程度の単純なことになるのだ。
「百聞は一見にしかず」が常であるため、ご使用のパソコンの
C:\Program File (x86)\Arduino\libraries\Braccio\examples
などにある、Braccioのサンプルプログラムを参照してみてほしい。また、Githubの開発ツリーでもサンプルが公開されている。しばらく遊んでみることが、Braccioの基本的なC++やサーボライブラリのソースコードに触れ、ロボットのプログラミングの背後にある考え方を自身で一から理解することになるだろう。
ロボット制御をお楽しみください!