自律走行型システムの開発プラットフォーム
この記事を購読
 Dave from DesignSpark
Dave from DesignSpark
こちらの記事について、内容・翻訳・視点・長さなど、皆様のご意見をお送りください。今後の記事製作の参考にしたいと思います。
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
こちらの記事の感想をお聞かせください。
私が初めてロボティクスに興味を持つようになったのは、かつて防衛産業の海軍部門に務めていた時でした。そこでは「自律システム」と呼ばれる分野に莫大な投資が行われており、そのことがとても印象に残りました。この「自律システム」、最小船員で運航する船舶の開発への応用を想定されており、海底マッピングから、海洋学、機雷掃海などへの展開が期待されていました。その後その時の経験が、今の自動車業界での動運転技術の興味関心につながることとなっています。
この記事では、ロボティクス動力源を活用した「自律型システム」用のモジュール型プラットフォームの自作・構築についてまとめてみたいと思います。またその全過程で、DesignSpark PCB とDesignSpark Mechanicalを使用して行いました。これにより 読者の皆さんは無料でこの設計を追体験できると思います。

部品リスト:
- 250mm硬質プラスチックゴム製ホイール x 4
- 8mmシャフトカップリング x4、グラブねじ付き
- 12V DCギヤモータ x 4
- 4芯マルチストランドケーブル
- IP68ケーブルグランド x 2
- 汎用シュリンクラップ
- M8スタッドバー
- M8プレーン六角ナット(ナイロック使用可能)
- M8ねじ
- M8ペニーワッシャ
- Gewiss GW-44-207 IP56エンクロージャ
- 1500mAhリチウムイオンバッテリ
- カスタム3Dプリンタで出力したバッテリホルダ、M4 x 30保持ねじ及びナット
- Molexコネクタアセンブリ
- 単芯ケーブル
- M4セルフタッピングねじ
- カスタム基板
- 3mmアルミプレート
- SPSTトグルスイッチ
シャーシ
アルミ製シャーシのサイドパネルは、モータと電子機器用エンクロージャの取り付けに使用されているだけでなく、機械の上部構造の仕上げとなるスタッドバーの固定にも使用されます。当初シャーシパネルは錆びたくず鉄から手作業で製作し、とてもうまく機能しましたが、やや作りが雑であったため、適切なCNCマシンと軽量アルミを使用して再度シャーシパネルをCADでカットすることにしました。下図はその図面(DesignSpark Mechanicalで作成)です。

DesignSpark Mechanical
モータ
各主電源駆動モータは、4本のM4ねじでシャーシのサイドパネルに取り付けています。モータは、各ロータに取り付けられた大きなホイールを回転させるのに必要なトルクを増加させるため、高いギア比を持つものを選択しました。モータの四輪駆動効果により、ロボットは高い牽引力を発揮します。今のところ、45度の木製スロープをスリップすることなく上り、転倒動作を試験するためにれんが製の垂直壁をグリップさせるとひっくり返ります。
このロボットは複雑なステアリングリンケージを備えている従来の車のようには設計されておらず、四輪駆動を使用してその場旋回を行う戦車のように、起伏に富んだ地形をより果敢に運転できるように設計されています。なお、トレッド/ホイールベース比については、自動車設計のように黄金比(1:1.6)を採用することはせず、スキッドステアリング時に完璧なトルクベクタリングを実現するため、1:1の比率を採用していることに留意してください。

ホイール
選択した大型の硬質プラスチック及びゴム製のホイールにより、牽引力と地上高の適切な融合で峻険な地形に強いプラットフォームになります。ロボットのシャーシは、ホイールからの保護のため、実際に平らで広い面にぶつけることはできません。ホイールは、ホイールの中空車軸の途中まで強力瞬間接着剤で接着されている8mmシャフトカップリングでモータシャフトに取り付けています。グラブねじは、ホイールをモータシャフトに取り付けるため、露出したままにしています。

エンクロージャ
エンクロージャは、動作環境で発生することのある水の飛び跳ねや雨水に対する防滴・防水性能のIP等級に準拠するものを選択しました。エンクロージャは、各サイドにつき2セットのM8ボルト・ナット・ワッシャ用の加工穴を使ってアルミシャーシに装着。構造全体の強度を高めています。このエンクロージャには、エンクロージャの前面と背面にあるIP定格のケーブルグランド用の加工穴があり、背面にはオン/オフのトグルスイッチ用の加工穴があります。

基板及び制御システム設計
デフォルトのシステムは、基本的な遠隔測定法の能力を備えた「遠隔操作探査機」(ROV)として動作するように設計されていました。このシステムは、多くのメーカ開発キットから期待された拡張I/Oで増強することができ、短時間で簡単に完全自律型システムへと拡張できます。
その結果として得られたこの設計概念の背景にあるハードウェアアーキテクチャには、スマートフォン制御と遠隔測定法用の実行可能なBluetoothトランシーバ、簡単なUARTプログラミング用のArduinoブートローダを備えたAtmel ATMEGA328P-PU IC、及びRaspberry Piを含む多くのIC、シールド、開発ボードを接続するアナログ/I2C/SPIインターフェイス端末の使用が含まれていました。
アクチュエータ制御は、ATMEGAのPMW互換デジタルピンから制御される一対のMOSFET Hブリッジ回路を介して可能になりました。この回路への電源は、1500mAh 11.1vリチウムイオンバッテリであったものの、マイクロコントローラのロジック電源は5Vに安定化されていました。これは、モータに電力を供給するために最大11.1Vまでバッファリングする必要がありました。基板の銅線に追加ではんだを加えることにより、I2Rの損失とあらゆる電流から発生する過剰な熱を最小限に抑えるように注意しました。

DesignSpark PCB
バッテリと基板は単芯ケーブルで接続されており、単純なトグルスイッチでオン/オフが順次切り替えられます。複数のMolexコネクタアセンブリを使用して、基板上の端子ブロックのねじを外す必要なく充電のために簡単に取り外すことできるバッテリを設計しました。前後のモータの接続には4芯マルチストランドケーブルを使用。左右のモータチャンネルは、それぞれHブリッジによって制御されます。
基板は、手頃な「naked-proto」オンラインサービスを利用してEurocircuitsから調達しました。
3Dプリンタで出力したバッテリマウント
この先進的な設計で直面した1つの問題は、プラットフォームが走行するときにバッテリがガタつくことでした。私は、簡単に操作できる内蔵マウントでバッテリを固定しようと考えていたので、デザインがより頑丈になりました。DesignSpark Mechanicalを使用することで、短時間でデザインを作成してエクスポートし、PLAから出力することができました。この設計を使い、M4ねじを使用してバッテリをしっかり固定できたため、基板コンポーネントをぶつける心配がなくなりました。

DesignSpark Mechanical
スマートフォンアプリ
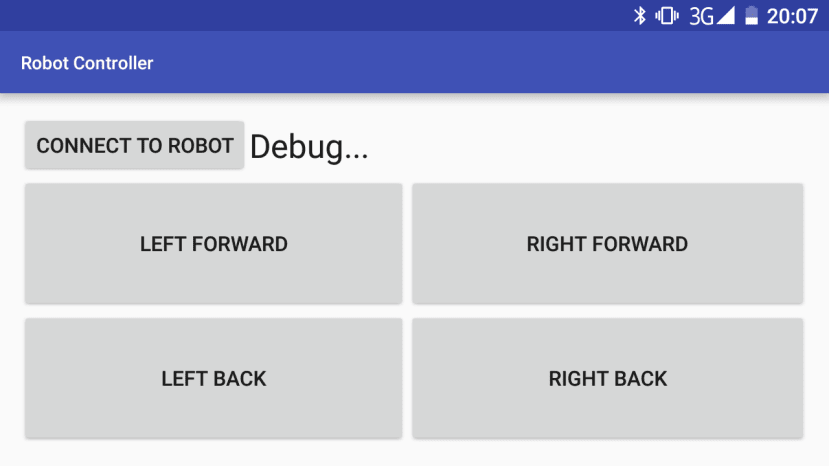
Bluetoothトランシーバを制御システムで使用することにより、基本的なIOTスタイルのネットワーキング及びプラットフォームのメカトロニクス要素の直接制御が可能になりました。このシステムの最も興味深いアプリケーションは、左右のホイールの方向制御に使用する遠隔操作モードです。このモードは、ごく基本的なAndroidスマートフォンアプリを介して実行します。Bluetooth制御の新しい点は、スタンドアロンコントローラを必要とせず、一般的なISMマルチアクセス周波数帯域を使用する一般的なスマートフォンやタブレットを利用するという点です。ただし、このことは、信号範囲が狭く、その後のプラットフォームの設計反復で、改良された無線システムと、広範なミッションではより強力な基地局が必要であるということも意味します。
ビデオ
まとめ
このプロジェクトは私の大学の論文の一部を発展させたものであり、このプラットフォームは自律型ロボット及び自動運転技術への私の興味関心の赴くままに進化を遂げてきました。私は、こうした機械が実現するさまざまな目覚ましい作業から発想を得てきました。今後はぜひ、あらゆる地形に対応する自律型開発プラットフォームでこれまでに達成したことを、ダカールラリーといった世界規模のより大きなステージへと拡げていきたいと考えています。また、この大志を育みつつ、このようなアイディアの開発を続けていきます。