NVIDIA Jetson Nano应用- Google Colab云端训练客制化 YOLOv4物件辨识-上篇
关注文章
 戴夫来自 DesignSpark
戴夫来自 DesignSpark
你觉得这篇文章怎么样? 帮助我们为您提供更好的内容。
戴夫来自 DesignSpark
Thank you! Your feedback has been received.
戴夫来自 DesignSpark
There was a problem submitting your feedback, please try again later.
戴夫来自 DesignSpark
你觉得这篇文章怎么样?
|
作者 |
张嘉钧 |
|
难度 |
普通 |
|
材料表 |
Webcam X1 NVIDIA Jetson Nano X1 |
上篇分为两个大项目:
1.YOLOv4训练其他数据集的基本概念
2.如何在Colab上使用YOLOv4
关于YOLOv4这边就不多作介绍了,基本上YOLOv4是现今集大成之作,整合了各种技术,想要了解详细的技术可以在网络上找到很多相关的资源,我这边蛮推荐初学者可以去看吴恩达老师在coursera上面的AI课程,其中也有教到YOLO的运作原理,虽然没有讲到论文这么深入的技术但是却贯穿了YOLO的精随。
Transfer Learning的基本概念
这次实作的部分是关于YOLOv4用于客制化的数据集,还是有几个基本的概念需要提到,像是用已经训练好的权重再去训练其他的数据集,这个动作就叫做「Transfer Learning」,中文可能会称作「迁移式学习」、「转移学习」;主要的迁移式学习有分成两种「Feature Extraction」、「Fine Tuning」。
「Feature Extraction」中文为「特征撷取」,会保留预训练模型CNN的部分也就是保留模型良好的特征撷取的能力,只会重新训练Fully Connected的部分 (简称FC),我自己的理解会把FC当成是排列组合,原本只能辨识猫跟狗的模型,由于已经会撷取猫跟狗的特征,这时候导入马的图片,它也能撷取出特征,只是不懂得将撷取出来的特征归类成新的类别,所以这时候我们只训练FC (排列组合的部分),让他可以重新学习如何将各种特征进行分类;我们用下图来模拟情境,灰白格子代表CNN的权重。
1.透过预训练模型的CNN的部分可以撷取出特定特征
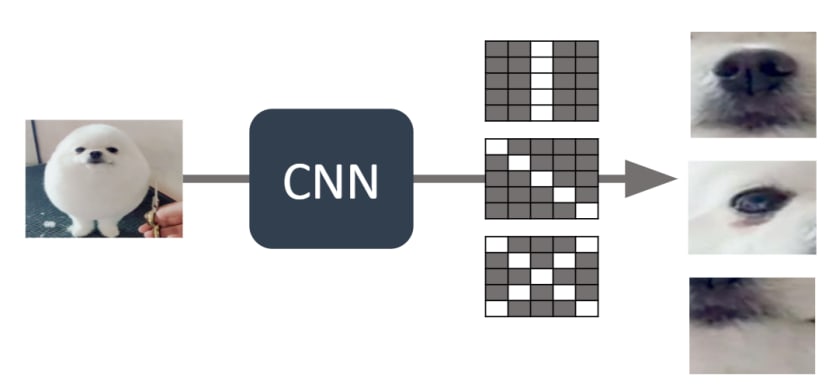
2.输入一样是动物类型的图片,就算不是原本训练的数据它一样能撷取出特定的特征

3.所以我们只需要冻结 ( freeze ) CNN的部分,重新训练FC即可:

「Fine Tuning」中文为「微调」,我们直接用训练好的权重进行重新训练,与从头训练不同的地方在于从头训练是一组随机的数值,而预训练模型不是,它将能优化原本就已经训练过的权重,不过这种方式最好还是基于数据集类型雷同的情况下;我们一样用图片来仿真情境。
1.原先预训练模型训练出来的CNN权重将能优秀的辨识出狗的特征

2.假设我们已经知道下图的权重用来辨识新数据-马更为优秀

3.从概念上来说,微调会比从头训练更快达到目标

最后我整理了一个表格,让大家参考一下什么样的情况适合用哪一个技术,以上如果有叙述错误或不清的地方,欢迎在下方留言区告诉我:

Colab介绍与使用
Transfer Learning概念的部分已经讲完了,接下来就要开始进入实作的部分了!这次我们使用的工具是Colaboratory (简称Colab),如果有看我们早期的文章可以注意到我们很喜欢运用Colab这个平台,这是由Google推出的在线Python程序执行平台,免费版本的Colab提供了8小时的免费GPU可以使用,所以手边没有强大GPU的同学们就可以善用这个平台的资源。
 |
|
Colab的详细介绍 https://colab.research.google.com/notebooks/intro.ipynb#scrollTo=5fCEDCU_qrC0 |
首先,我们要先在自己的Google云端硬盘中心增Colab的档案,我们需要在云端硬盘的空白处点击右键→更多→链接更多应用程序

在上方搜寻列输入「Colab」就可以进行安装

安装完再回到云端硬盘点击右键→更多→Google Colaboratory,接着就会看到跟下图一样的画面,这样就成功在你的云端硬盘中开启了Colab
接下来有几个重要的部分,第一个要先启动你的GPU,编辑→笔记本设定→硬件加速器→GPU→储存,这样就完成GPU设定了。

我们可以使用各种AI框架的程序来检查,这边我使用PyTorch来检查GPU的状况,第一个print是确认GPU能否运作,第二个print是显示显示适配器的名称,我们将程序复制到区块里面,并且透过Shift+Enter执行程序。
import torch
print(torch.cuda.is_available())
print(torch.cuda.get_device_name())

YOLOv4在Colab上如何运作
到目前我们的事前准备已经完成一半了,接下来我们要测试一下在Colab上能否运作YOLOv4,Colab如果没有绑定云端硬盘的话它会自动分配一些空间给你暂存使用,所以这边我们直接使用暂存的空间来测试YOLOv4就可以了,后续会再教如何挂接到云端硬盘,首先一样要先将darknet的Github给Clone下来。
!git clone https://github.com/AlexeyAB/darknet.git接着需要移动进去darknet的文件夹,在Colab这种交互式Python环境,可以透过%、! 来仿真终端机的指令,特别是cd只能透过%不能透过 !。
%cd ./darknet在建构darknet之前需要先修改Makefile才行,这边使用Linux的指令sed,-i代表会直接替换档案内容,替换的模式选择s (search),第一个//包住的内容是要搜寻的内容,第二个//中的则是要替换掉的内容。
!sed -i 's/OPENCV=0/OPENCV=1/' Makefile
!sed -i 's/GPU=0/GPU=1/' Makefile
!sed -i 's/CUDNN=0/CUDNN=1/' Makefile
!sed -i 's/CUDNN_HALF=0/CUDNN_HALF=1/' Makefile
!sed -i 's/LIBSO=0/LIBSO=1/' Makefile
最后就可以开始建构了,大概需要两分至三分钟的时间。
!make我们现在已经可以使用darknet的函式库了,进行推论前还需要下载训练好的权重,我们使用wget直接从网络上抓取,这些档案连结都可以在darknet的github中找到。
# 下载 yolov4-tiny
!wget https://github.com/AlexeyAB/darknet/releases/download/darknet_yolo_v4_pre/yolov4-tiny.weights
# 下载 yolov4
!wget https://github.com/AlexeyAB/darknet/releases/download/darknet_yolo_v3_optimal/yolov4.weights
接着可以透过下列指令进行测试,coco.data 存放数据集的信息 像是图片大小、类别等等;yolov4.cfg 则是存放yolov4神经网络模型的信息;yolov4.weights 为刚刚下载的训练好的权重;data/dog.jpg 为输入的数据;-thresh 阀值 越大需要的信心指数越高。
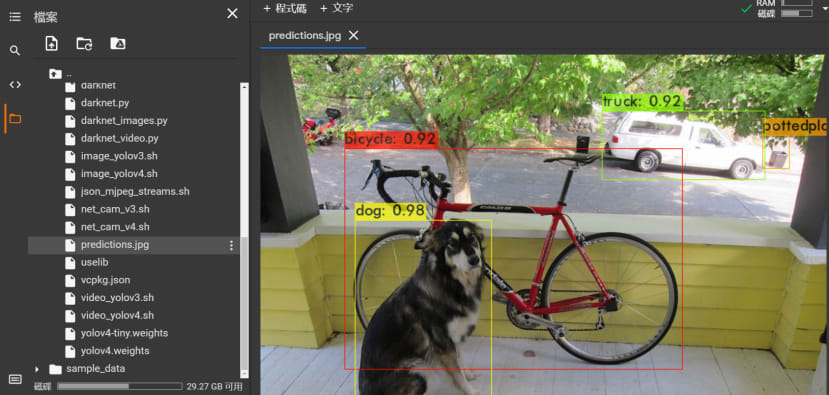
!./darknet detector test ./cfg/coco.data ./cfg/yolov4.cfg ./yolov4.weights data/dog.jpg -i 0 -thresh 0.25观察输出结果可以看到我们这张dog.jpg中有bicycle、dog、truck、pottedplant以及他们对应的信心指数,还有一个warning表达的是它没有屏幕可以显示,这个无伤大雅,我们可以通过直接在档案总管找到/darknet/predictions.jpg这张图片并点击两下开启查看:
除此之外也可以透过下列的程序来将结果显示出来,因为matplotlib跟Jupyter有较高的兼容性,而Colab使用的是Jupyter Notebook的环境,我们可以透过 %matplotlib inline 这段程序让matplot的图表显示在Colab当中。
import cv2
import matplotlib.pyplot as plt
# 让 matplot 图表显示在Jupyter Notebook里面
%matplotlib inline
# 透过OpenCV读取图片
path = 'predictions.jpg'
img = cv2.imread(path)
# 在 Jupyter Notebook 上需要转换成 Matplot 显示才行
fig = plt.gcf()
fig.set_size_inches(18, 10)
plt.axis('off')
plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))
plt.show()
接着我在网络上找到这段程序代码可以在Colab上运行实时影像辨识,第一段程序码表示的是透过Python建构一个Inference的副函式叫做 darknet_helper,通过这个darknet_helper可以获取到辨识结果与输出结果的宽高比例。
# import darknet functions to perform object detections
from darknet import *
# load in our YOLOv4 architecture network
network, class_names, class_colors = load_network("cfg/yolov4.cfg", "cfg/coco.data", "yolov4.weights")
width = network_width(network)
height = network_height(network)
# darknet helper function to run detection on image
def darknet_helper(img, width, height):
darknet_image = make_image(width, height, 3)
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
img_resized = cv2.resize(img_rgb, (width, height),
interpolation=cv2.INTER_LINEAR)
# get image ratios to convert bounding boxes to proper size
img_height, img_width, _ = img.shape
width_ratio = img_width/width
height_ratio = img_height/height
# run model on darknet style image to get detections
copy_image_from_bytes(darknet_image, img_resized.tobytes())
detections = detect_image(network, class_names, darknet_image)
free_image(darknet_image)
return detections, width_ratio, height_ratio
第二段程序代码则是如何在Colab上运作实时影像的部分,由于是Javascript的程序所以我也不多作介绍了,有兴趣的可以在自己研究。
# import dependencies
from IPython.display import display, Javascript, Image
from google.colab.output import eval_js
from google.colab.patches import cv2_imshow
from base64 import b64decode, b64encode
import cv2
import numpy as np
import PIL
import io
import html
import time
import matplotlib.pyplot as plt
%matplotlib inline
# function to convert the JavaScript object into an OpenCV image
def js_to_image(js_reply):
"""
Params:
js_reply: JavaScript object containing image from webcam
Returns:
img: OpenCV BGR image
"""
# decode base64 image
image_bytes = b64decode(js_reply.split(',')[1])
# convert bytes to numpy array
jpg_as_np = np.frombuffer(image_bytes, dtype=np.uint8)
# decode numpy array into OpenCV BGR image
img = cv2.imdecode(jpg_as_np, flags=1)
return img
# function to convert OpenCV Rectangle bounding box image into base64 byte string to be overlayed on video stream
def bbox_to_bytes(bbox_array):
"""
Params:
bbox_array: Numpy array (pixels) containing rectangle to overlay on video stream.
Returns:
bytes: Base64 image byte string
"""
# convert array into PIL image
bbox_PIL = PIL.Image.fromarray(bbox_array, 'RGBA')
iobuf = io.BytesIO()
# format bbox into png for return
bbox_PIL.save(iobuf, format='png')
# format return string
bbox_bytes = 'data:image/png;base64,{}'.format((str(b64encode(iobuf.getvalue()), 'utf-8')))
return bbox_bytes
# JavaScript to properly create our live video stream using our webcam as input
def video_stream():
js = Javascript('''
var video;
var div = null;
var stream;
var captureCanvas;
var imgElement;
var labelElement;
var pendingResolve = null;
var shutdown = false;
function removeDom() {
stream.getVideoTracks()[0].stop();
video.remove();
div.remove();
video = null;
div = null;
stream = null;
imgElement = null;
captureCanvas = null;
labelElement = null;
}
function onAnimationFrame() {
if (!shutdown) {
window.requestAnimationFrame(onAnimationFrame);
}
if (pendingResolve) {
var result = "";
if (!shutdown) {
captureCanvas.getContext('2d').drawImage(video, 0, 0, 640, 480);
result = captureCanvas.toDataURL('image/jpeg', 0.8)
}
var lp = pendingResolve;
pendingResolve = null;
lp(result);
}
}
async function createDom() {
if (div !== null) {
return stream;
}
div = document.createElement('div');
div.style.border = '2px solid black';
div.style.padding = '3px';
div.style.width = '100%';
div.style.maxWidth = '600px';
document.body.appendChild(div);
const modelOut = document.createElement('div');
modelOut.innerHTML = "<span>Status:</span>";
labelElement = document.createElement('span');
labelElement.innerText = 'No data';
labelElement.style.fontWeight = 'bold';
modelOut.appendChild(labelElement);
div.appendChild(modelOut);
video = document.createElement('video');
video.style.display = 'block';
video.width = div.clientWidth - 6;
video.setAttribute('playsinline', '');
video.onclick = () => { shutdown = true; };
stream = await navigator.mediaDevices.getUserMedia(
{video: { facingMode: "environment"}});
div.appendChild(video);
imgElement = document.createElement('img');
imgElement.style.position = 'absolute';
imgElement.style.zIndex = 1;
imgElement.onclick = () => { shutdown = true; };
div.appendChild(imgElement);
const instruction = document.createElement('div');
instruction.innerHTML =
'<span style="color: red; font-weight: bold;">' +
'When finished, click here or on the video to stop this demo</span>';
div.appendChild(instruction);
instruction.onclick = () => { shutdown = true; };
video.srcObject = stream;
await video.play();
captureCanvas = document.createElement('canvas');
captureCanvas.width = 640; //video.videoWidth;
captureCanvas.height = 480; //video.videoHeight;
window.requestAnimationFrame(onAnimationFrame);
return stream;
}
async function stream_frame(label, imgData) {
if (shutdown) {
removeDom();
shutdown = false;
return '';
}
var preCreate = Date.now();
stream = await createDom();
var preShow = Date.now();
if (label != "") {
labelElement.innerHTML = label;
}
if (imgData != "") {
var videoRect = video.getClientRects()[0];
imgElement.style.top = videoRect.top + "px";
imgElement.style.left = videoRect.left + "px";
imgElement.style.width = videoRect.width + "px";
imgElement.style.height = videoRect.height + "px";
imgElement.src = imgData;
}
var preCapture = Date.now();
var result = await new Promise(function(resolve, reject) {
pendingResolve = resolve;
});
shutdown = false;
return {'create': preShow - preCreate,
'show': preCapture - preShow,
'capture': Date.now() - preCapture,
'img': result};
}
''')
display(js)
def video_frame(label, bbox):
data = eval_js('stream_frame("{}", "{}")'.format(label, bbox))
return data
最后的流程如下:取得影像,将影像转换成特定格式并且辨识,将结果绘制到特定图层,将图层覆盖上去并且更新画面的内容。
# 开启影像串流
video_stream()
# 标题
label_html = 'Capturing...'
# 初始化参数
bbox = ''
count = 0
while True:
# 显示并取得影像
js_reply = video_frame(label_html, bbox)
if not js_reply:
break
# 将影像转换成OpenCV的格式
frame = js_to_image(js_reply["img"])
# 建立边界框的底图
bbox_array = np.zeros([480,640,4], dtype=np.uint8)
# 进行辨识
detections, width_ratio, height_ratio = darknet_helper(frame, width, height)
# 绘制边界框于刚刚建立的bbox_array
for label, confidence, bbox in detections:
left, top, right, bottom = bbox2points(bbox)
left, top, right, bottom = int(left * width_ratio), int(top * height_ratio), int(right * width_ratio), int(bottom * height_ratio)
bbox_array = cv2.rectangle(bbox_array, (left, top), (right, bottom), class_colors[label], 2)
bbox_array = cv2.putText(bbox_array, "{} [{:.2f}]".format(label, float(confidence)),
(left, top - 5), cv2.FONT_HERSHEY_SIMPLEX, 0.5,
class_colors[label], 2)
bbox_array[:,:,3] = (bbox_array.max(axis = 2) > 0 ).astype(int) * 255
# 将 bbox_array转换成可以输入到画面上的 byte 格式
bbox_bytes = bbox_to_bytes(bbox_array)
# 更新bbox这样下一次画面中的画面才会更新
bbox = bbox_bytes
结语
到这边你已经将基础观念都已经摸熟了,包括怎么去Transfer Learning的基本概念以及 YOLOv4如何在Colab上运作,接下来我们就进入Transfer Learning的实作的部分吧!