Plate-forme de développement de système autonome
Suivez l'article
 Dave from DesignSpark
Dave from DesignSpark
Que pensez-vous de cet article ? Aidez-nous à vous fournir un meilleur contenu.
Dave from DesignSpark
Merci! Vos commentaires ont été reçus.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
Que pensez-vous de cet article ?
C'est lorsque je travaillais dans le secteur de la défense que j'ai commencé à m'intéresser à la robotique. J'avais remarqué que des investissements importants étaient consacrés au développement de ce que l'on appelait les « systèmes autonomes », dont les applications étaient extrêmement variées, allant de la cartographie des fonds marins à l'océanographie et même au dragage de mines, et qui venaient compléter l'adoption par le secteur de la marine de navires haute technologie et bas profils nécessitant un équipage plus réduit. Bien sûr, maintenant que je travaille dans l'industrie automobile, je me rends compte qu'un plus grand nombre de gens sont conscients de cette évolution dans le contexte des technologies de la conduite automatique, et du bruit médiatique généré par la course des grandes entreprises technologiques pour perfectionner les modèles destinés au grand public.
Cette technologie joue un rôle moteur dans le développement de la robotique contemporaine et m'a inspiré la création d'une plate-forme modulaire et conviviale pour créateurs qui m'a permis de développer mes propres systèmes autonomes. J'ai documenté le processus de création ci-dessous.

Liste des pièces :
- 4 roues solides en plastique et caoutchouc de 250 mm
- 4 accouplements d'axe de 8 mm avec vis sans tête
- 4 motoréducteurs 12 v c.c.
- Câble multiconducteur à 4 cœurs
- 2 presse-étoupes IP68
- Film plastique à usage général
- Barre filetée M8
- Ecrous hexagonaux simples M8 (possibilité d'utiliser des écrous à frein élastique)
- Vis M8
- Rondelles de carrossier M8
- Boîtier Gewiss GW-44-207 IP56
- Batterie Li-Ion 1500 mAh
- Porte-pile personnalisé imprimé en 3D avec vis et écrou de maintien M4x30
- Connecteurs assemblés Molex
- Câble à 1 conducteur
- Vis autotaraudeuses M4
- Circuit imprimé personnalisé
- Plaque aluminium de 3 mm
- Interrupteur à bascule SPST
Notez que j'ai été très minutieux lors de la conception de ce projet, qui a nécessité beaucoup de travail CAO, avec les logiciels DesignSpak PCB et Mechanical.
Châssis
Les panneaux latéraux aluminium du châssis permettent de monter les moteurs et les boîtiers pour l'électronique, tout en fixant la barre filetée qui vient compléter la superstructure mécanique. A l'origine, ils avaient été façonnés à la main à partir d'un vieux morceau d'acier rouillé, mais ils étaient un peu grossiers ; j'ai donc décidé d'en passer par la CAO et j'ai recoupé les panneaux du châssis dans de l'aluminium léger à l'aide d'une vraie machine CNC. Le plan est présenté ci-dessous.

DesignSpark Mechanical
Moteurs
Chacun des moteurs d'entraînement est monté sur les panneaux latéraux du châssis à l'aide de quatre vis M4. Les moteurs choisis ont un rapport de vitesse élevé afin d'augmenter le couple requis pour faire tourner les grandes roues fixées à chaque rotor. L'effet d'entraînement à quatre roues des moteurs dote le robot d'une excellente traction. Je l'ai fait rouler sur une rampe en bois à 45 degrés sans qu'il se retourne et je l'ai renversé sur un mur de briques vertical pour tester son fonctionnement à l'envers.
Le robot n'a pas été conçu pour rouler comme une voiture conventionnelle dotée de systèmes de direction complexes, mais plutôt pour aborder les terrains difficiles de façon agressive, à la manière d'un tank, en utilisant son entraînement à quatre roues pour tourner sur lui-même. Notez que le rapport empreinte-empattement n'est pas basé sur le ratio d'or (1:1.6) comme dans la conception automobile, mais utilise plutôt un rapport 1:1 pour un vecteur de couple parfait lors des dérapages.

Roues
Grâce à ses grandes roues solides en plastique et caoutchouc, la plate-forme convient parfaitement aux terrains difficiles, et offre une excellente combinaison de traction et de dégagement au sol. Grâce à la protection fournie par les roues, le châssis du robot ne peut pas être heurté par une large surface plate. Les roues sont fixées aux axes du moteur par le biais d'un accouplement d'axes de 8 mm collé à la colle instantanée dans le moyeu creux de la roue, laissant une vis sans tête exposée pour la fixation de la roue à l'axe du moteur.

Boîtier
Le boîtier choisi a un indice de protection IP pour résister aux éventuels éclaboussements ou à la pluie qu'il peut subir dans son environnement opérationnel. Il est fixé à un châssis en aluminium par le biais d'orifices usinés pour deux boulons M8, avec écrous et rondelles de part et d'autre, pour renforcer la structure globale. Le boîtier présente d'autres orifices usinés pour les presse-étoupes avec indice de protection IP à l'avant et à l'arrière du boîtier, et un autre pour l'interrupteur à bascule marche-arrêt à l'arrière.

Conception du circuit imprimé et du système de commande
Le système par défaut a été conçu pour fonctionner comme un ROV (remote operated vehicle ou véhicule commandé à distance) avec un potentiel de télémétrie de base. Il est possible d'y ajouter l'E/S étendue que l'on l'attend de la plupart des kits de développement pour créateurs, ce qui permet une extension rapide et simple en un système totalement autonome.
L'architecture matérielle sous-tendant cette approche de la conception comprenait l'utilisation d'un transceiver Bluetooth activable pour la commande et la télémétrie via smartphone, un CI Atmel ATMEGA328P-PU avec bootloader Arduino pour la programmation UART, ainsi que des terminaux d'interface Analogue, I2C et SPI pour la connexion de nombreux CI, blindages et cartes de développement, y compris Raspberry Pi.
La commande de l'actionneur s'effectuait par le biais d'une paire de circuits à ponts en H MOSFET contrôlés depuis les broches numériques compatibles PWM de l'ATMEGA. L'alimentation était assurée par une batterie Li-Ion 1 500 mAh 11,1 v mais l'alimentation logique du microcontrôleur était régulée à 5 v, et devait remonter à 11,1 v pour transmettre la puissance aux moteurs. J'ai pris la précaution d'ajouter une soudure supplémentaire aux pistes en cuivre du circuit imprimé pour réduire les pertes I2R ainsi que la chaleur excessive produite par tout courant éventuel.

DesignSpark PCB
La batterie et le circuit imprimé étaient connectés par un câble à un conducteur et activés/désactivés par un simple interrupteur à bascule en série. A l'aide de connecteurs assemblés Molex, j'ai conçu la batterie pour qu'elle soit facile à retirer pour le chargement, sans que cela nécessite de dévisser les blocs de jonction du circuit imprimé. J'ai utilisé un câble multiconducteur à 4 conducteurs pour connecter les moteurs à l'avant et à l'arrière, et les ponts en H contrôlaient respectivement les canaux de moteur gauche et droit.
Je me suis procuré le circuit imprimé auprès d'Eurocircuits en utilisant le service en ligne « naked-proto » abordable proposé par l'entreprise.
Montage pour batterie à impression 3D
Lors de la première conception, j'ai rencontré un problème lié aux vibrations de la batterie durant les déplacements de la plate-forme. La solution a consisté à fixer la batterie en place avec un montage interne accessible pour rendre la conception plus robuste. J'ai utilisé DesignSpark Mechanical pour créer et exporter rapidement une conception qui a ensuite été imprimée en PLA. Avec cette conception, j'ai pu monter la batterie et la fixer fermement en place à l'aide de vis M4 ; plus aucun risque de heurter les composants du circuit imprimé.

DesignSpark Mechanical
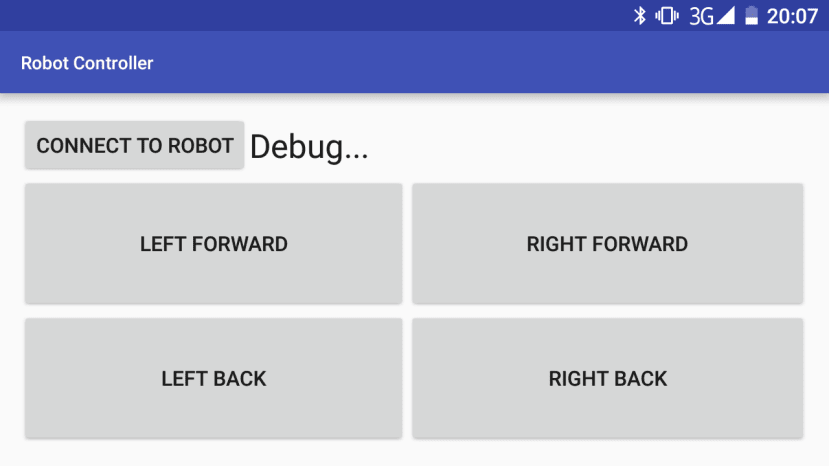
App pour smartphone
L'utilisation d'un transceiver Bluetooth sur le système de commande a permis une mise en réseau basique de type IOT ainsi que le contrôle direct des éléments mécatroniques de la plate-forme. L'application la plus intéressante est le mode de fonctionnement à distance exécuté par le biais d'une app pour smartphone Android très basique utilisée pour contrôler les directions des roues gauche et droite. La nouveauté de la commande Bluetooth est qu'elle n'a pas besoin d'un contrôleur autonome mais qu'il suffit d'un smartphone ou d'une tablette ordinaires utilisant des bandes de fréquences à accès multiple ISM communes. Cependant, cela implique également une courte portée du signal, et des versions ultérieures de cette plate-forme nécessiteront une amélioration du système radio et une station de base plus puissante pour des missions prolongées.
Video
Conclusion
Ce projet est dans la lignée de ce que j'avais commencé avec mon mémoire de fin d'étude ; la plate-forme s'est développée en parallèle à mon intérêt pour la robotique autonome et la technologie sans conducteur. J'ai été constamment inspiré par la très large gamme des tâches que ces machines peuvent effectuer et j'aimerais transférer ce que j'ai pu réaliser jusqu'à présent en termes de plate-formes de développement autonome tout-terrain sur une scène internationale plus étendue telle que le rallye Dakar. Je vais continuer à développer ces idées dans cette perspective.