戴夫来自 DesignSpark
戴夫来自 DesignSpark
你觉得这篇文章怎么样? 帮助我们为您提供更好的内容。
戴夫来自 DesignSpark
Thank you! Your feedback has been received.
戴夫来自 DesignSpark
There was a problem submitting your feedback, please try again later.
戴夫来自 DesignSpark
你觉得这篇文章怎么样?
这是DockerPi Sensor Hub开发板的首次外观,该Sensorhub是IoT中的环境参数。它包括温度传感器,湿度传感器,气压传感器,照明和红外热传感器。本文将分为两个部分,硬件设置和软件设置。
硬件部分
首先,在硬件部分,让我们看一下盒子里面的东西,我们有一个Sensor Hub开发板,4个M2.5x12铜棒,4对M2.5x6螺钉和螺母,一个NTC温度传感器(防水)。
盒子的東西

现在让我们开始动手实践。
首先,我们必须使用铜棒和M2.5 * 6螺母固定Sensorhub。

现在我们要用树莓派强制SensorHub,如下所示
然后,我们必须使用4个M2.5x6螺钉用SensorHub锁定树莓派

完成如下
最后,我们必须插入NTC温度传感器

完成如下

软件部分
我在树莓派的桌面上使用以下代码创建ep0106.py
这是软件部分。该程序如下
import smbus
DEVICE_BUS = 1
DEVICE_ADDR = 0x17
TEMP_REG = 0x01
LIGHT_REG_L = 0x02
LIGHT_REG_H = 0x03
STATUS_REG = 0x04
ON_BOARD_TEMP_REG = 0x05
ON_BOARD_HUMIDITY_REG = 0x06
ON_BOARD_SENSOR_ERROR = 0x07
BMP280_TEMP_REG = 0x08
BMP280_PRESSURE_REG_L = 0x09
BMP280_PRESSURE_REG_M = 0x0A
BMP280_PRESSURE_REG_H = 0x0B
BMP280_STATUS = 0x0C
HUMAN_DETECT = 0x0D
bus = smbus.SMBus(DEVICE_BUS)
aReceiveBuf = []
aReceiveBuf.append(0x00) # 占位符
for i in range(TEMP_REG,HUMAN_DETECT + 1):
aReceiveBuf.append(bus.read_byte_data(DEVICE_ADDR, i))
if aReceiveBuf[STATUS_REG] & 0x01 :
print("Off-chip temperature sensor overrange!")
elif aReceiveBuf[STATUS_REG] & 0x02 :
print("No external temperature sensor!")
else :
print("Current off-chip sensor temperature = %d Celsius" % aReceiveBuf[TEMP_REG])
if aReceiveBuf[STATUS_REG] & 0x04 :
print("Onboard brightness sensor overrange!")
elif aReceiveBuf[STATUS_REG] & 0x08 :
print("Onboard brightness sensor failure!")
else :
print("Current onboard sensor brightness = %d Lux" % (aReceiveBuf[LIGHT_REG_H] << 8 | aReceiveBuf[LIGHT_REG_L]))
print("Current onboard sensor temperature = %d Celsius" % aReceiveBuf[ON_BOARD_TEMP_REG])
print("Current onboard sensor humidity = %d %%" % aReceiveBuf[ON_BOARD_HUMIDITY_REG])
if aReceiveBuf[ON_BOARD_SENSOR_ERROR] != 0 :
print("Onboard temperature and humidity sensor data may not be up to date!")
if aReceiveBuf[BMP280_STATUS] == 0 :
print("Current barometer temperature = %d Celsius" % aReceiveBuf[BMP280_TEMP_REG])
print("Current barometer pressure = %d pascal" % (aReceiveBuf[BMP280_PRESSURE_REG_L] | aReceiveBuf[BMP280_PRESSURE_REG_M] << 8 | aReceiveBuf[BMP280_PRESSURE_REG_H] << 16))
else :
print("Onboard barometer works abnormally!")
if aReceiveBuf[HUMAN_DETECT] == 1 :
print("Live body detected within 5 seconds!")
else:
print("No humans detected!")
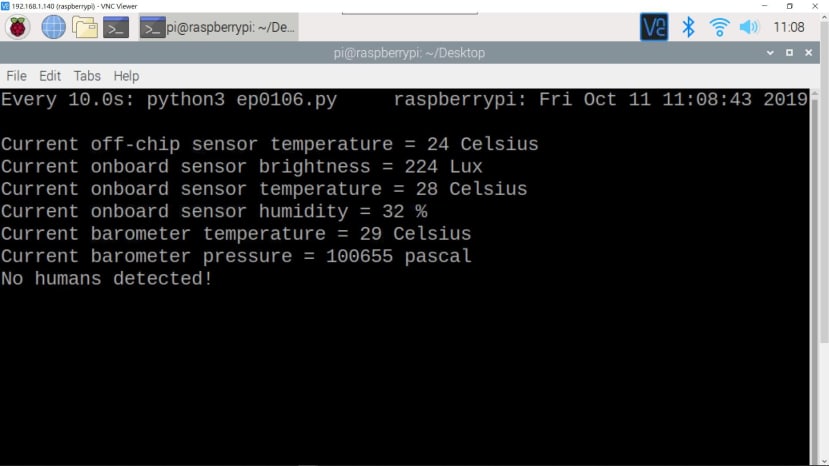
该程序仅运行一次,因此我们需要键入Linux命令以每10秒计算一次以更新脚本.
watch -n 10 python3 ep0106.py
您会发现这样显示的数据。