Bauen und Programmieren Sie einen Braccio-Roboter
Artikel folgen
 Dave von DesignSpark
Dave von DesignSpark
Wie finden Sie diesen Artikel? Helfen Sie uns, bessere Inhalte für Sie bereitzustellen.
Dave von DesignSpark
Vielen Dank! Ihr Feedback ist eingegangen.
Dave von DesignSpark
There was a problem submitting your feedback, please try again later.
Dave von DesignSpark
Was denken Sie über diesen Artikel?
Auf DesignSpark gab es schon einige Artikel über das Braccio Tinkerkit (111-3738) . Das ist auch kein Wunder, schließlich ist die Kombination aus Arduino und Braccio ein günstiger (und sehr unterhaltsamer!) Start in die Welt der Robotik. In diesem Artikel blicke ich auf meinen ersten Tag mit einem Braccio Tinkerkit zurück – und auf die Neujahrsbotschaft an DesignSpark-Leser.
Wenn du es baust, wird er kommen …

Das Auspacken eines Braccio Tinkerkit (111-3738) weckt Erinnerungen wie aus Charles Dickens‘ Weihnachtsgeschichte: ein kleiner Junge vor dem Weihnachtsbaum, der voller Freude sein Geschenk aufreißt und ein Meccano No. 7-Set enthüllt. Beim Öffnen der Kiste offenbarten sich all die sorgfältig verpackten kleinen Teile, die mir (und meinem Vater!) viele Stunden Tüftelspaß bescherten, in denen wir erst alle Beispiele der Anleitung und schließlich allerhand merkwürdige Heath-Robinson-artige Apparate bauten. Auch die Braccio-Kiste kommt mit vielen schön verpackten Teilen daher, die darum betteln, nach den verspielten Piktogrammanleitungen zusammengesetzt werden.
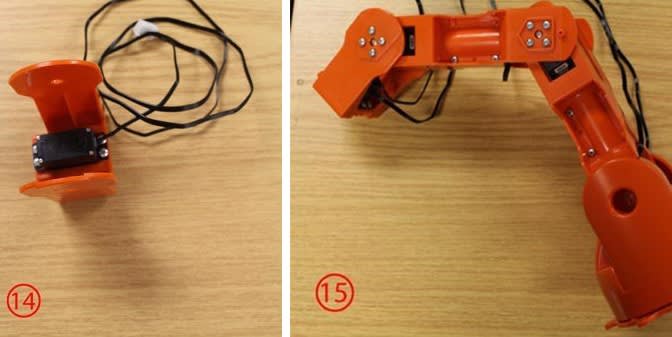
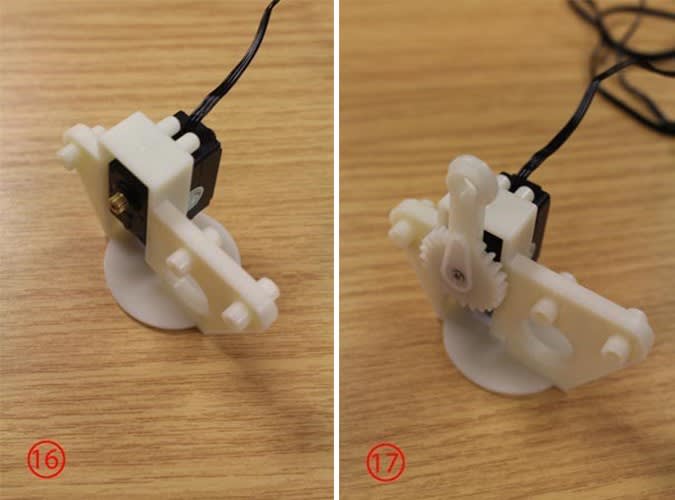
Im Geiste der Piktogramm-Bauanleitungen folgt nun also die schrittweise Anleitung zur Entstehung meines Braccio.











Reden kann jeder. Zeig mir den Code.*
Natürlich wäre unser Braccio nur eine knallorangene bewegliche Skulptur, wenn er keinen Code hätte, um ihn zu motivieren. Zum Glück wird der Braccio von Arduino unterstützt – die schwerste Programmierarbeit wurde also bereits von Leuten erledigt, die die Hardware in- und auswendig kennen.
Für uns heißt das, dass wir zur Steuerung unseres Braccio nichts weiter tun müssen, als Sätze von Neigungswinkeln für jede Position einzugeben, die unser Roboter einnehmen soll.
Demonstration ist immer besser als bloßes Erklären. Deshalb gibt es Braccio-Beispiele, die unter einem Pfad wie diesen auf Ihrem PC installiert werden: C:\Program File (x86)\Arduino\libraries\Braccio\examples. Die finden Sie auch im Entwicklungsbaum auf Github.
Ich habe diesem Post unsere Neujahrsbotschaft als Beispiel angefügt. Hoffentlich wird durch die Kommentare zum Code klar, was wir eigentlich tun – im Prinzip nichts anderes als das:
- Einstellung einer bekannten Position
- Einnahme anderer Positionen
- Wiederholung von 2
Wenn Sie schon eine Zeit lang rumgespielt haben, können Sie mal einen Blick auf das zugrunde liegende C++ und den Servobibliothek-Quellcode werfen und sich noch mal überlegen, ob Sie wirklich einen Roboter von Grund auf programmieren wollen.
Viel Spaß beim Programmieren!