
 戴夫来自 DesignSpark
戴夫来自 DesignSpark
你觉得这篇文章怎么样? 帮助我们为您提供更好的内容。
戴夫来自 DesignSpark
Thank you! Your feedback has been received.
戴夫来自 DesignSpark
There was a problem submitting your feedback, please try again later.
戴夫来自 DesignSpark
你觉得这篇文章怎么样?
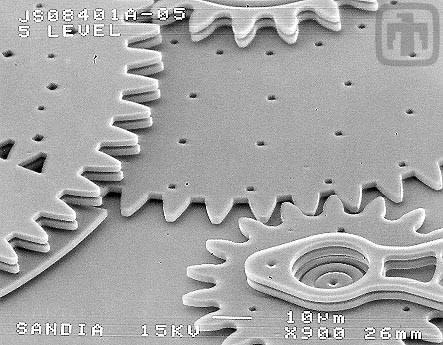
由桑迪亚国家实验室提供, SUMMiT™ Technologies, www.sandia.gov/mstc
有时只需要有人提出正确(事后回想起来,也很明显)的问题而已。但是如果要推动事情往好的一面发展,还必须在正确的时间提出问题:在技术发展的浪潮开始解决这个问题时。
“小小”的历史
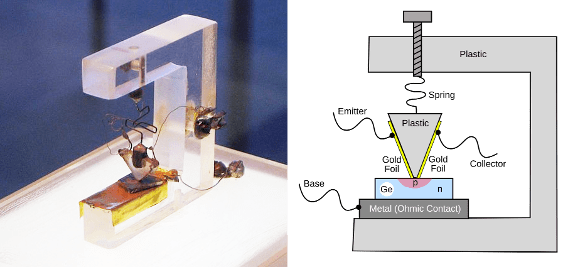
1947 年 12 月 23 日贝尔实验室宣布发明 PNP 点接触锗晶体管。数月后,团队领导人 William Shockley 发明了更为坚固的“三明治结构”晶体管,这种结构后来发展为从 20 世纪 50 年代起无所不在的双极性结型晶体管。
Courtesy Bell Labs
1954 年,Charles S Smith 发现锗和硅丝的电阻在材料受到压力时会发生变化。压电电阻效应与金属中的应变效应类似,但重要的是,压电电阻效应比金属应变效应要大出三个数量级:从一开始就表现出传感器适用性。到 1958 年,硅应变仪商业研发成功。
同年,Jack Kilby 刚刚加入 Texas Instruments,工作时间还不足以获得任何的假期待遇,因此当公司里的其它人离开公司享受为期两周的传统假期时,他独自留在实验室中测试自己的构想。
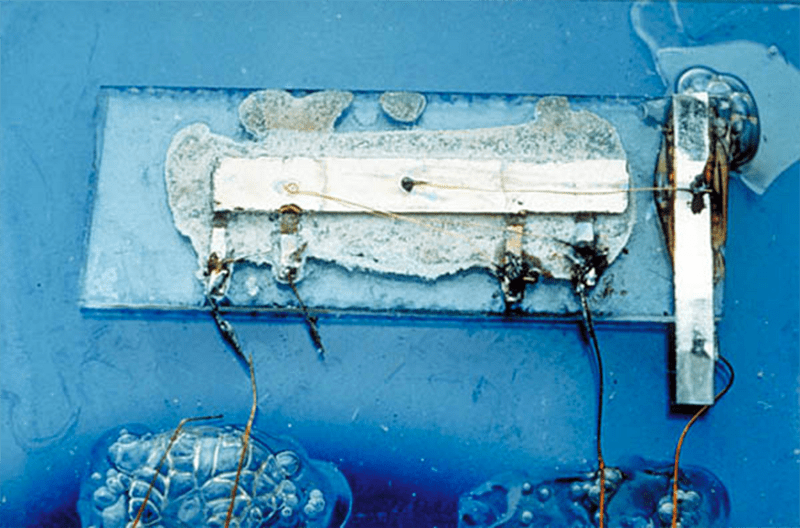
在一块 7/16 英寸乘以 1/16 英寸的锗板上,他用 1 个晶体管、3 个电阻器和 1 个电容器搭建了一个电路。1958 年 9 月 12 日,他正是通过这个装置展示连续正弦波的生成。
Robert Noyce(后来 Fairchild Semiconductor 和 Intel 的联合创始人)当时正在硅材料上研究相同的题材。1961 年 3 月,Fairchild 发布了第一个数字逻辑函数集成电路,其中包含四个晶体管和五个电阻器。硅集成电路虽然不是第一个问世,但是后来经证明,其商业性要好得多。
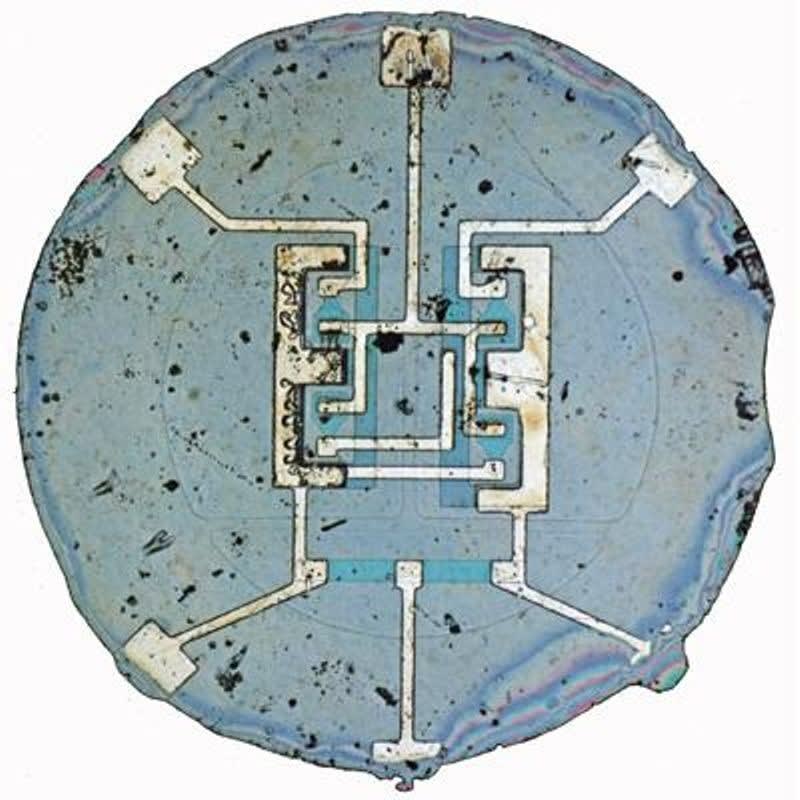
Courtesy Fairchild Semiconductor
可以看到,当著名的物理学家理查德·费曼于 1959 年在美国物理协会上发表“底部还有大量空间”演讲时,已经存在发展原子级别操作理念,催生微技术的沃土。许多科技历史学家把这场演讲视为 MEMS 革命的开端。
MEMS
看到这里,大家可能会想:“Redstone,你可真会讲故事啊,你说的 MEMS 是指什么?”好的,我很高兴你提了这个问题。
微机电系统,在日本有时被称为“微型机械”,而在欧洲部分地区又被称作微系统技术 (MST)。它是一项由微电子工业发展而来的衍生技术。专为制造集成电路而开发的制造技术经过长时间的改造,成为精密复杂的微加工过程,例如体微加工和表面微加工,又如高深宽比微加工 (HARM)。这些技术有选择性地移除部分硅区域,或额外添加结构层以形成复杂的机械或机电组件,这些组件可充分利用硅的电气和机械性质。
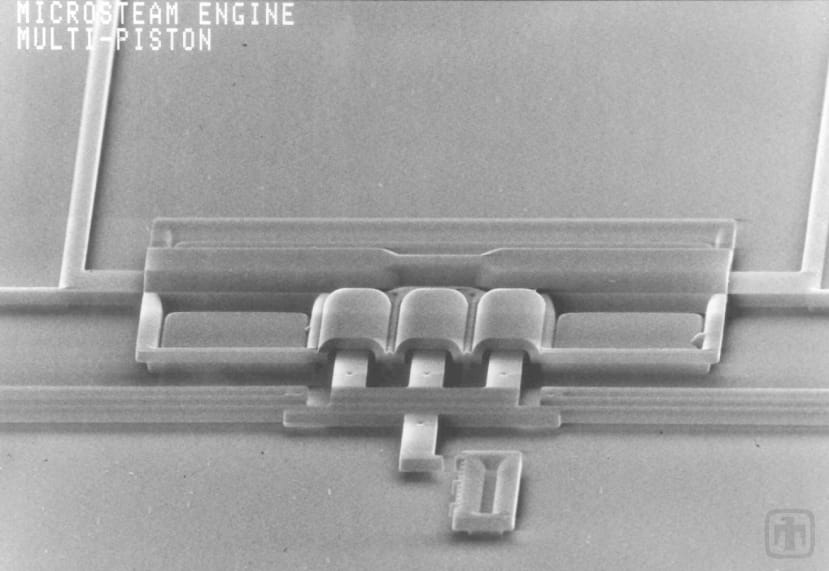
三胀往复式蒸汽机,由桑迪亚国家实验室、SUMMiT™ Technologies、www.sandia.gov/mstc 提供
由此制造的组件和设备尺寸小到 1 微米,大到 1 毫米。杠杆、流道、齿轮、活塞、电机,甚至蒸汽机都采用这些技术制造。也许值得一提的是,MEMS 中的“微”指的是这些微加工组件,而非整个系统,而这些系统仍然通常包含用于供应电能、控制设备和外部通信的集成电子设备。
为什么这么小?
“你讲的可真精彩啊,Redstone,”我能听到你说,“但这类设备不是通常用于大型机械中吗?为什么如此小?”又是一个很好的问题。大家今天注意力非常集中。答案就藏在比例原则的利用中。
一般来说,更小的物体受到与体积相关现象的影响更小,例如质量(以及固有惯性),可是受导热或接触力等表面积现象的影响更大。
为了更好地解释我的意思,请想象一个各边长度为“a”的简单立方体:
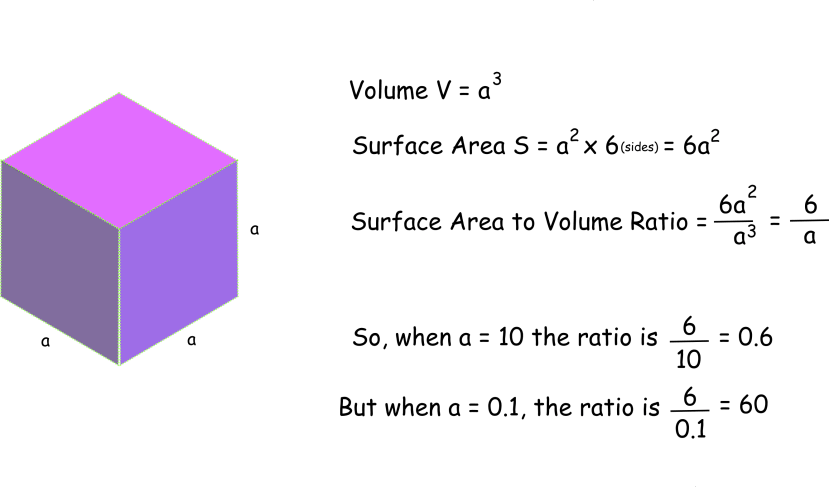
这是什么意思?好的,随着物体的体积(与蓄热能力成正比)减小,表面积(与散热成正比)成比例地增大,因此同一个物体的散热性越是成比例地增大,体积则越小。
举另一个例子,我们还发现横梁的弹性常数与横梁尺寸成反比,横梁越小,弹性越大。
当我们利用这类比例因数时,我们发现微尺度传感器比全标度传感器具有更高的灵敏度,更好的线性度、更快的响应速度和更宽的动态范围。微尺度执行机构具有更快的动态响应速度和更低的能耗。这两类设备均可在批量生产时获得更低的制造成本。
进入现实世界
当前的 MEMS 行业是从汽车安全气囊发展而来。20 世纪 90 年代初,MEMS 加速计开始替代传统机械球管装置,这是该技术的首个商业应用。
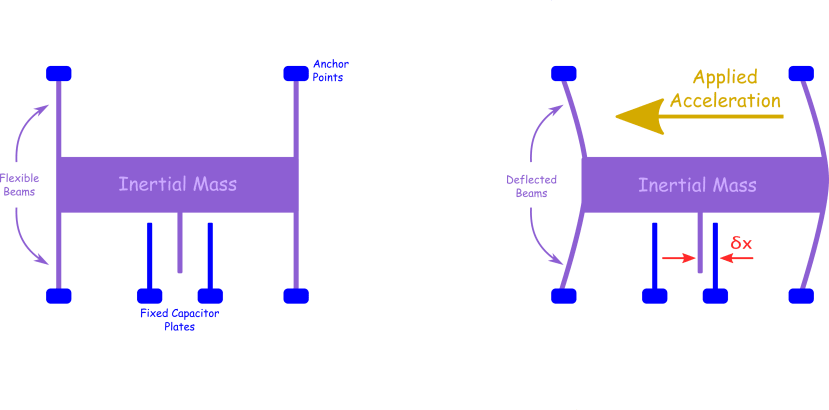
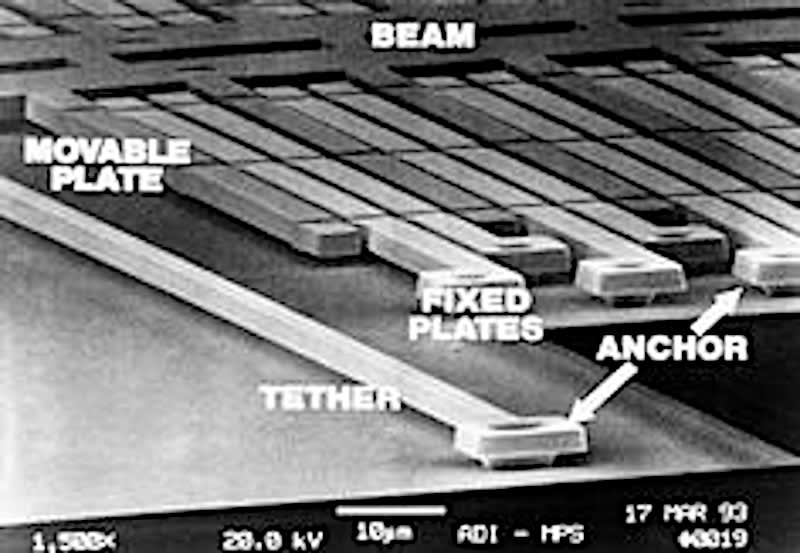
加速计是一种电容式(或压阻式)设备,它由一个悬挂的质量块和板组件组成。随着质量块加速,板之间的电容发生变化。这种变化经过检测、处理,以便系统做出相应反应。
ADXL50 Accelerometer Courtesy Analog Devices
截至 2000 年,有 6000 万这类加速计在现场中得到应用。经证实可在汽车内部各种具有挑战性的环境中可靠运行后,沉默的怀疑论者将它们广泛用于其它汽车应用中,例如主动式悬吊系统、防抱死制动系统、电器和导航控制、燃料传感器、降噪、侧翻检测、安全带约束装置以及张紧、振动监控等等。
除了汽车工业以外,Apple iPhone 4 采用了革命性的技术,成为第一台具有全 9 自由度 (DoF) 运动感应功能的便携式消费级设备。这是通过集成三轴加速计、三轴陀螺仪和三轴电子罗盘实现的。
如果你在好奇心的驱使下掀开 iPhone 4 的背壳(怎么了?这是有可能发生的…),你会在 A4 处理器旁边找到一、两个 ST Micro 设备:LIS331DLH 加速计和 L3G4200D 陀螺仪,尽管这些设备未标注 ST Micro 部件号。而 Asahi Kasei AKM8975 电子罗盘则位于主板的另一侧。
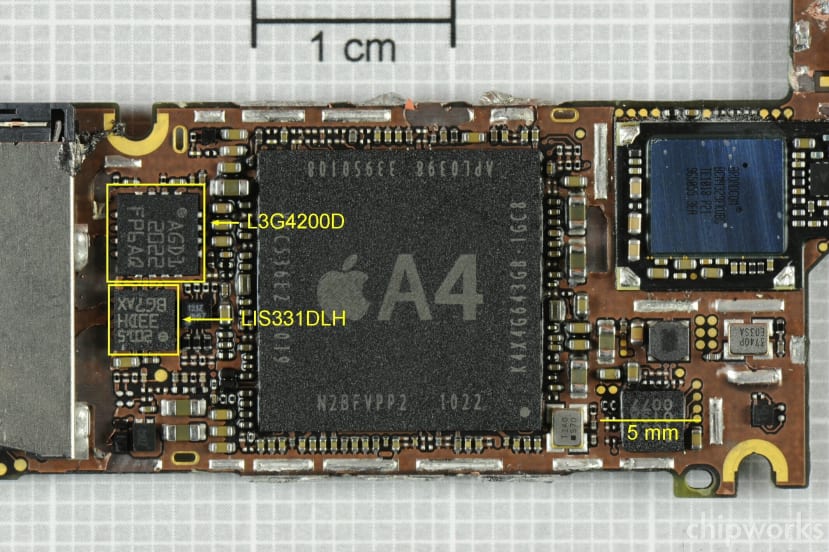
Courtesy Chipworks
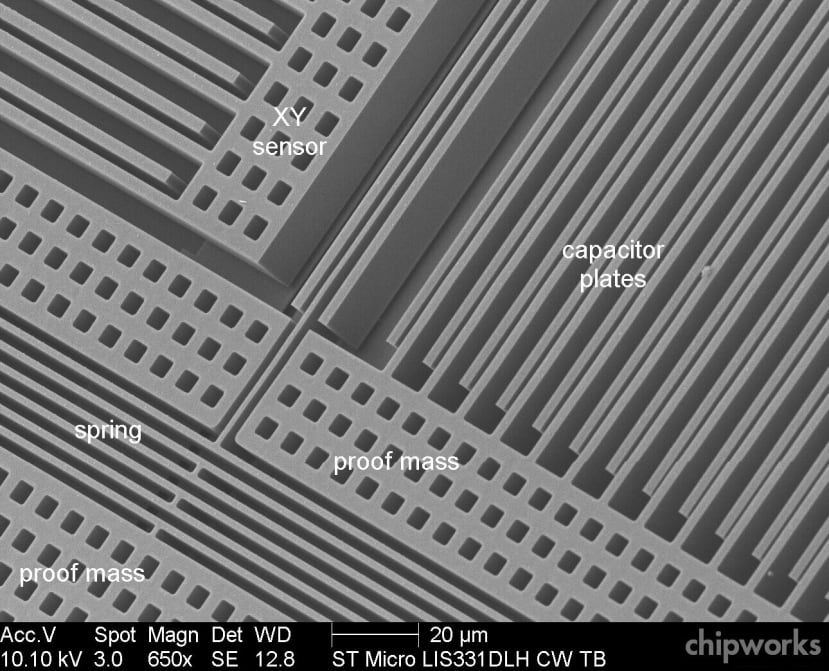
LIS331DLH 封装中包含两块芯片,一块是 ASIC,用于处理来自 MEMS 结构的信号,而另一块是我们的 MEMS 加速计本身。与其它供应商不同的是,ST Micro 将 ASIC 堆叠在 MEMS 设备上方,以减小占用空间。设备通过标准 I2C/SPI 串行接口连接至 A4 处理器。放大 X-Y 平面传感器时,我们可以看到微加工达到的精致细节:
迈入工业 4.0
“可是 Redstone,你这个厚脸皮的趣闻传播者,”我能听到你说,“MEMS 现在怎么样了?”又是一个好问题。
从多方面来看,最近一代的 MEMS 设备跟随电子集成电路高度集成的发展潮流,现在常常与多功能一起整合在单一设备中。
惯性测量单元(又称 IMU),通常至少包含三轴加速计(测量加速度和角定位)、三轴陀螺仪(测量角速度),此外还常常包含三轴磁力计,用于测试磁场强度。
加速计可测量三轴方向的静态和动态加速度。“静态加速度”听起来很奇怪,但是它属于重要的传感器性能:重力反应。当没有动态加速度时,每个加速计输出将反映出重力的轴向。
所有的振动陀螺仪均利用在旋转参考系中出现的科里奥利加速度来测量角速度:
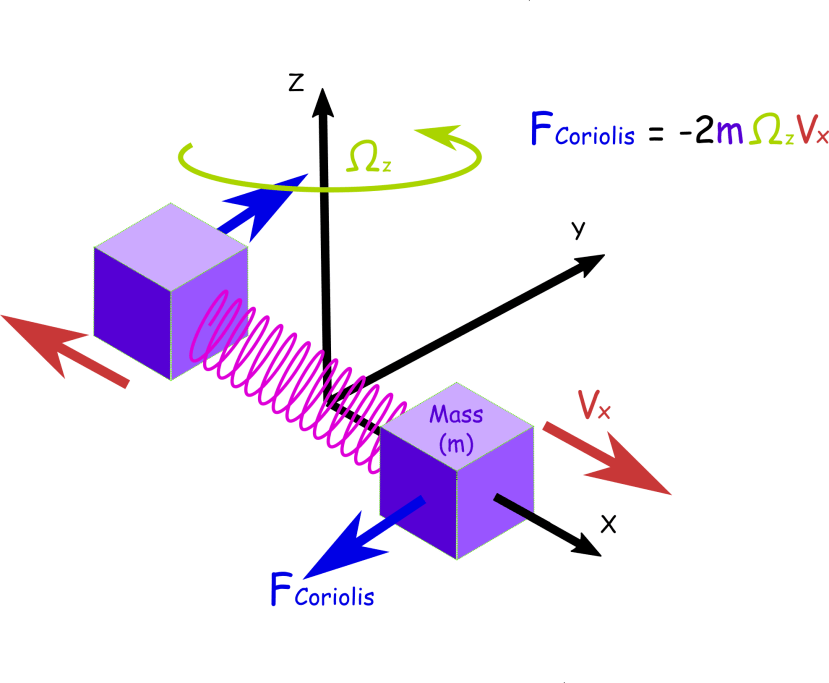
“可是 Redstone,你这个优美散文的爱好者,”我能听到你说,“你知道科里奥利力是虚构的,不是吗?”是的,我当然知道。可是事情是这样的:这个效应可以很容易地准确测量,因此就暂且如此,我们继续讲解。
三轴磁力计用于测量三条正交轴的磁场强度,以估计地球磁场的局部方向定位角。磁力计可改善部分系统的定位测量准确度,但是会受到强大的动态场干扰源的影响,例如电动机,因此它不包含在所有的惯性测量单元中。
在同一个封装中集成和校准这些设备,连同用于处理的 ASIC,使原始测量数据的常规滤波与融合处理成为可能(结合来自多种传感器的读数获得最佳估值)。一些设备甚至包含机器学习内核。这些都表明 IoT 或工业控制环境中的微控制器已摆脱所有计算的重担,只需根据从串行接口获得的数字信息做出快速(且低功耗)的决策即可。
现代惯性测量单元可用作闭合回路控制的组成部分,以达到主动减振或补偿动态位移的效果,例如在运动的汽车中。反馈传感器向仪器平台提供动态定位信息,然后反馈控制器处理此信息,转换为伺服电动机的矫正控制信号。惯性测量单元在工业中的真正优势在于它们能够线性处理 5 Hz 至 500 Hz 的振动频率,同时加速度的处理能力高达 25 g。
当我们理智地看待这一问题时,常人(未接受重力应变训练)最低可在 6 g 重力下晕倒(这还是没有 5 Hz 至 500 Hz 振荡的情况下)。如今在过山车上可以体验到的最大重力加速度是南非金矿城“恐惧之塔”的 6.3 g。这一定得上我的遗愿清单!
参与进来
我们之前已经提到了,MEMS 设备范围很广,几乎包括任何可以想到的变换器或执行机构。例如:
-
喷墨打印头:使用压电材料或通过微加工流道进行热泡沫喷射。
-
数字微镜器件:数字微镜器件使用成百上千个可独立调节的微镜,生成超清晰的投影图像。
-
麦克风:用于便携式设备和蓝牙头戴耳机中。
-
扩音器:用于入耳式头戴耳机或助听器
-
光交换技术:用于光数据通信技术的交换和校准。
-
压力传感器:用于汽车轮胎中或甚至一次性血压监测仪的动脉中。
-
微尺度能量收集:使用压电、静电和电磁设备收集能量,使低功耗系统实现自供电。
例子还有很多,同时还不断有新的类型加入。近年来一个有趣的方向是 BioMEMS 领域的发展,从嵌入式医疗设备(例如支架)到芯片实验室设备。
我们之前提到早期 iPhone 4 采用了 ST Micro MEMS 设备。如果你访问现在的MEMS页面 ,就能看到该技术已在当年的基础上有了进一步的发展。现在相关的产品多种多样,涵盖消费品领域、汽车和工业 4.0 应用。
考虑到我们知道的关于惯性测量单元的一切,我想最吸引眼球的一类应该是 iNEMO™ 惯性模块 (875-0918) 和 (875-0927) 。这些惯性测量单元包含可运行传感器内分类引擎的嵌入式机器学习内核。
如果你想快速着手开发 MEMS 传感器,可以尝试新的 STWIN SensorTile 无线工业节点 STEVAL-STWINKT1 (193-9794) 。