试验水下摄像无人机
关注文章
 戴夫来自 DesignSpark
戴夫来自 DesignSpark
你觉得这篇文章怎么样? 帮助我们为您提供更好的内容。
戴夫来自 DesignSpark
Thank you! Your feedback has been received.
戴夫来自 DesignSpark
There was a problem submitting your feedback, please try again later.
戴夫来自 DesignSpark
你觉得这篇文章怎么样?
在 2019 年 BrightSparks 大奖即将颁发之际,我想尝试制作一件稍有不同的作品带到今年的活动现场。我已经打算再次用超大手提箱携带“Rover”,于是我想继续尝试机器人主题,并用水下摄像无人机设计进行试验。
该项目的目标是创建一个基础平台,用于试验国内、商业和科学海底调查应用。这可能包括从扫描水面船只船体完整性和其他水下结构,到通过调查鱼类和珊瑚群的健康状况来评估基本环境问题的任何内容。

物料清单
- PVC 110m 排水管
- PLA 1.75mm 打印线材
- 黄色塑料漆
- 塑料底漆
- 120mm 软管夹 (027-7884)
- 直插式海水泵 (763-2544)
- 密封 12V 铅酸电池 (537-5450)
- 螺钉接线端子 (choc-block) (813-3123)
- M12 IP68 电缆固定头 (669-4654)
- 两芯电缆 (660-4071)
- 4芯电缆 (660-4037)
- 面板安装按钮 (014-4432)
- 钥匙开关 (032-1026)
- 单芯线
- CCTV 眼球摄像机 (PAL)
- M4 螺钉和锁紧螺母
- M5 螺钉和锁紧螺母
- Perspex 视窗
- 接线端子压接 (613-9930)
- BNC 到螺钉接线端子转换器
- BNC 到 RCA 转换器
- 密封腻子
设计理念

3D 拆卸
该项目中,我的主要目标不是深海挖掘和沉船打捞中使用的大型昂贵商业系统,而是专用于各种轻型任务的经济型设计。为实现这一目标,我打算结合商用现货 (COTS) 组件和 3D 打印组件,制作出一款创新的低成本设计,并按照基本防水和移动功能的一系列要求进行测试。
在这一开发阶段,我将重点介绍如何使用基础摄像机馈送和水面移动功能搭建主船体。后续迭代将包括深度控制分配和内部电子机箱,以内部容纳电路板和电池。
主船体
秉持经济实惠的精神,船只主船体由一段 110mm PVC 排水管制成。管道直径特别适合嵌入摄像机眼球和安装任何外部组件。管道的厚壁使它能够承受浅水浸没产生的压力,稍后浸没深度限制是测试的重要内容。
主船体上涂有典型的亮黄色航海涂装,采用多层塑料底漆和油漆完全涂覆,并等待油漆完全干燥,所有 3D 打印零件均保留本黑色。

皇家海军前卫级潜艇
此设计源于使用压缩空气控制纵摇和总浮力的潜艇结构,该结构通过将压缩空气压入和压出一系列压载舱来实现控制。在这一构造中,充满空气的船体相当于假想压载舱,从而使船只获得最大浮力。然而,制作如此小型的压载舱是一个重大的挑战,主要问题在于可用的压缩空气罐尺寸,此外虽然可以通过气动软管从表面供应压缩空气,但是此方案不太符合实际,需要寻找替代布局。
潜水爱好者中更为常用的深度控制方法是使用垂直推进器在水下直接推动船只。但是为了有效地执行此操作,需要使所有滞留空气的上浮力等于配重带来的下沉力,从而使船只达到浮力平衡。在实践中,许多潜水器实际上稍微呈现正浮力,这样一来,船只仍然能够基本不费力地下潜和上浮,但是当发生故障时,船只会逐渐浮上水面。我将在后续的开发工作中添加这些功能。
鼻锥和摄像机底座
鼻锥具有多项功能,因此必须设计合理,它的主要作用是防止主耐压船体漏水,同时还能以流体动力学方式搭载摄像机。在鼻锥内安装摄像机的第一个难题是集成一个透明视窗,在不影响外壳防水的情况下提供可见性,并且仍然能够承受少量的外部压力。

鼻锥 CAD 模型
为此,我从塑料切割公司购买了一张 4mm 厚的 Perspex 圆片,注意使视窗半径与光圈匹配。然后,我可以使用已知的 Perspex 视窗、摄像机眼球和船体尺寸进行 3D 建模并打印鼻锥。小心地将强力胶水涂抹在鼻锥的内唇面,将视窗粘在 3D 打印模型上,同时还能保持密封。此外,必须确保胶水不会溅到视窗上,因为任何除胶溶剂都会影响塑料的透明度。

鼻锥摄像机总成
为了正确密封鼻锥总成,使其紧密贴合船体,公差必须很小。测量船体的内半径并在鼻锥模型的套管上添加同心槽,这样后期可以添加 O 形圈形成防水密封,同时船只还能够拆卸维护。
摄像机馈送和显示器
该摄像机设计安装在船只正面,以第一人称视角呈现任何需要探索的水下环境。此开发阶段的视频信号格式是一种简单的模拟馈送 (PAL),它通过由两个 BNC 至螺钉接线端子转换器和一个 BNC 至 RCA 转换器连接的两芯电缆进行广播,然后再馈送至视频显示器。摄像机提供优质、可靠的图像,即使在低光照水平下也能在视频显示器上清晰地看到,这是使用改建 CCTV 设备的一大优势。
尾锥和电缆总管
尾锥的主要功能是防止主耐压船体漏水,这一点与鼻锥基本相同,但是尾锥还设计用作内部和外部电子设备的接口。为此,我需要安装多个高防护等级的电缆固定头,从而在防水的同时打造一个可以通入电缆的总管。
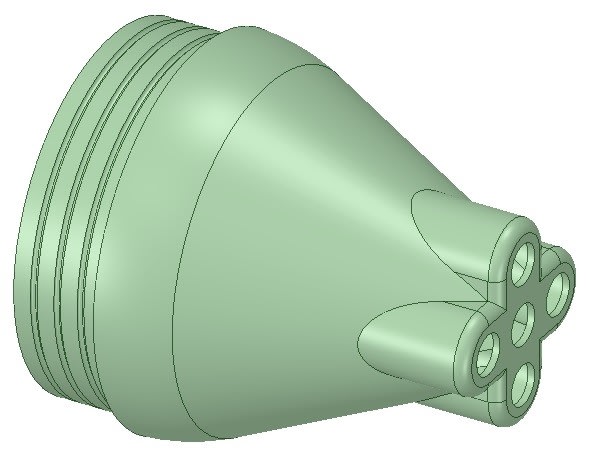
尾锥 CAD 模型
共有 5 条独立的电缆,每根电缆具有不同的功能,包括摄像头馈送、左右推进器、外部电池以及遥控绳。电缆数量多会增加船体漏水的风险,因此我将在以后的版本中对此进行改进。
推进器托架
推进器的选购是一项有趣的挑战,因为它们需要与船体平行以减少拖滞。最初,我计划使用一系列低成本的舱底泵,但是它们的设计不对称,因此实用性差且难以安装,这使得船只设计难以实现。于是,我决定使用一组直通式海水泵,确保找到一对能够产生合理推力的水泵,以推动船只在水中前进。
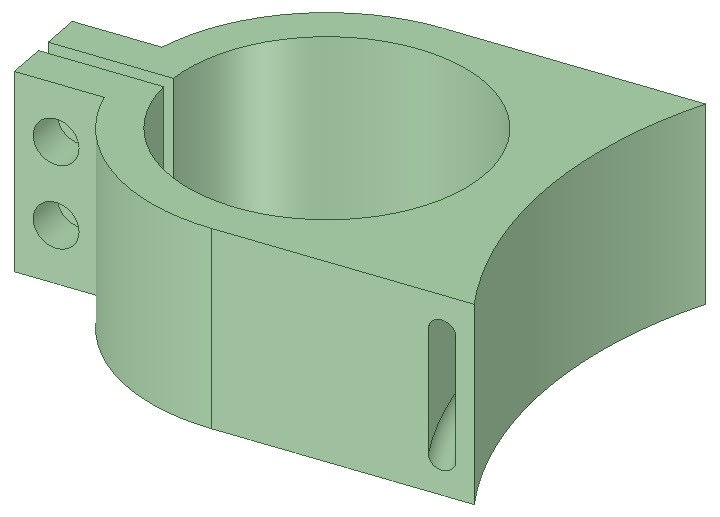
推进器托架 CAD 模型
由于船体是圆形的,没有简单的方法可以直接安装推进器,因此我决定通过 3D 打印制作几个托架,并使用一组软管夹将总成固定在船体上。我使用 DesignSpark Mechanical 为打印机建模并生成 CAD 文件,采用新颖的设计将软管夹穿过托架,注意匹配船体的圆弧轮廓,使推进器固定后能够按计划与船体齐平并平行。
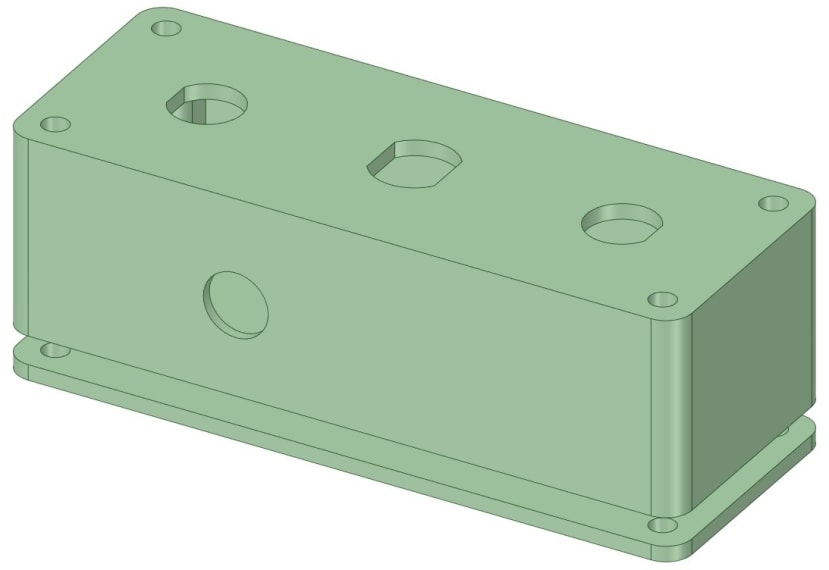
电池托架
为了最大限度地提高船只的稳定性,我决定将最重的部件放在船体底部以降低重心。鉴于上推力(浮力)的中心位于充气船体的中心,我决定取出作为自带电源使用的重型密封铅酸电池,并作为临时龙骨安装在船体下方。这样一来,即使在严苛的海洋环境中,船只也能保持最大限度的稳定性。

电池托架 CAD 模型
通过测量电池尺寸并使用 DesignSpark Mechanical 给夹紧托架建模,我能够镜像推进器托架的设计,并使用软管夹将它固定在船体下方。
远程控制
遥控潜水器比较特别,它们需要与操作人员之间进行有线连接才能正常运行。这是因为它们在水中移动时会遇到的较大的信号衰减电磁波,因此无论进行何种深度的探索,都需要有线连接。
遥控器 CAD 模型
本实验中使用的遥控器非常简陋,它使用两个按钮分别激活左、右推进器。一根四芯电缆将这些接口直接连接至推进器,每个推进器分别对应一根芯线,此外一根芯线连接电源,一根共用芯线连接到钥匙开关以开启和关闭所有部件。

遥控器总成
虽然我在初次构建时只使用了一根两米长的电缆,但是如需在真实海洋环境中进行远距离探索,则需要进行扩展。此外还将采用一种更可靠的串行通信总线(例如 RS485),以便在使用更少电缆的同时更准确地控制船只的移动和遥测。
浴缸测试
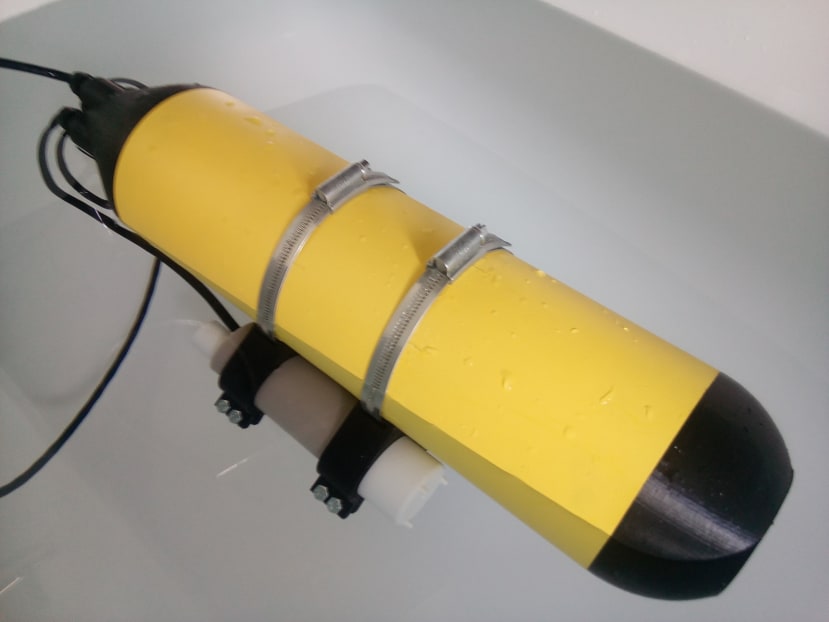
完整的小型潜水器搭建必须包含强制性浴缸测试,浴缸中的静水形成理想的受控环境,在这里我可以准确地测试设计理论。如图所示,足够的浮力使船只浮在水面上,同时临时龙骨使重心下移,从而达到最大限度的稳定性。
值得注意的是,由于摄像头较重,因此船只稍微向前倾斜。这可以轻松调整,方法是使用软管夹将龙骨向船尾移动,使船只平衡。这一缺点在后期非常实用,通过有意使用移动的压载系统来动态改变航行中船只的俯仰角,非常便利。

首次潜水器测试相当成功,没有气泡从船体漏出,尽管在后期检查时发现船体中有少量的水,但首次测试可以算是相当成功。这是一个良好的开端,但在任何适当的海上试航之前,还需要予以完善。
结论
尽管搭建过程比较复杂,尽管我给自己定下了在今年 BrightSparks 开始前的一个月内完成的截止期限,但是事实证明,项目非常成功,我深刻地认识到细节对搭建系统的重要性。3D 打印材料在项目中的运用也呈现出卓越的效果,因此将继续成为我下一版本的主题。该项目需要大量的 3D 建模工作,这需要我进一步熟悉 DesignSpark Mechanical CAD 软件。这样一来,我的设计工作变得非常简单,尤其是在导出 3D 打印时。我建议大家都尝试类似的项目。
随着初始版本的完成和经验教训的学习,我现在非常渴望将该项目扩展到用于实际应用的功能平台中。因此,我期待听到大家的反馈,请告诉我如何可以做得更好,接下来的方向如何,还有您是否有关于水下机器人的问题需要解决?
请在下方留言。