
 戴夫来自 DesignSpark
戴夫来自 DesignSpark
你觉得这篇文章怎么样? 帮助我们为您提供更好的内容。
戴夫来自 DesignSpark
Thank you! Your feedback has been received.
戴夫来自 DesignSpark
There was a problem submitting your feedback, please try again later.
戴夫来自 DesignSpark
你觉得这篇文章怎么样?
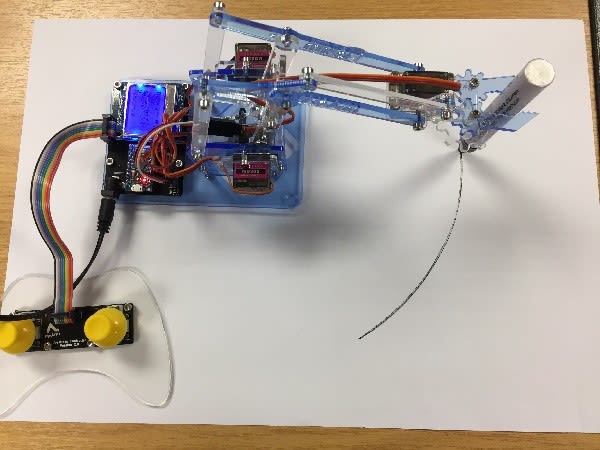
刚刚找到 Mime Industries 的新型 MeArm 机械臂豪华套件,想象着开箱即可组装机械臂。我期待看到它组装成形,了解这个小机械臂是如何工作的。它使用开源系统,非常适合您的项目。Maker Kit 还能让您使用自己的控制器来控制机械臂,如 Arduino、Raspberry Pi、Beaglebone 或其他控制器。您还可以利用平板材料切割一些单个零件,定制具体的机械臂设计。
该套件含有所有必要零件,可以与 Me Brain 控制器板组装一个完整的机械臂。唯一额外需要的就是一把小型十字螺丝刀,可用于拧紧伺服喇叭固定螺丝和 4 节 AA 电池。我使用的是 RS Pro 碱性电池 (744-2199)。

开始装配
开箱:您会看到套件中包含的所有部件。


-
- 其中有 4 个伺服电机,每个电机包含各种伺服机械臂以及所需的固定件
- 随附的 Me Brain 控制器板是兼容 Arduino 的电路板,经过预编程可与机械臂配合使用
- 完成装配所需的全部固定件
- 包含插入到控制器中的引线的电池盒
- 连接引线
- 2 个按钮,可用在操纵杆控制器上
- 压克力零件已经预切割为 4 块板材,还有一块操纵杆控制器底座。

开始装配之前,务必撕下压克力零件上的塑料膜,否则装配时会缠绕在接头上。
此外,在需要永久固定的位置,不要过度拧紧螺丝,因为螺丝会在压克力零件中攻丝,过度用力会出现滑丝。对于连杆、机械臂与齿轮枢轴等产生相对运动的位置,屈伸固定件必须采用宽松设计,以免限制转动。如果这些固定件过紧,将会导致机械臂无法正确运动和操作,致使伺服电机承受过大负载。
本文附有 2 本装配指南。
《MeArm 和 Arduino 组合使用指南》将提供示意图说明,支持机械臂的组装。
《MeArm 机械臂装配指南》包含一幅更加形象的插图,本文末尾提供了相关链接。
从操纵杆控制器入手
应该从 Arduino 主控制器板上拆下操纵杆控制器 PCB。它通过 4 颗 6mm 螺丝和螺纹孔固定到控制器形状的亚克力板上。然后使用提供的 10 芯带状电缆组件连接到 Arduino 控制器板,如图所示。

伺服电机校准
需要标记伺服电机的具体位置,以便从控制器板进行校准,还能在单个子组件装配好之后,测试操作是否正确,以免机械臂干扰固定部件。在此阶段很容易调整执行器的位置,然后再进入最终的装配阶段。
|
控制器连接 |
电机位置 |
操作 |
|
M |
中间 |
机械臂旋转 |
|
L |
向左 |
向上/向下 |
|
R |
向右 |
向前/向后 |
|
C |
夹爪/抓爪 |
张开/闭合 |
注:在我们的套件中,伺服接线的颜色不同于控制器颜色标记,所以以下数据介绍了如何按需连接:
|
伺服接线颜色 |
伺服接线 |
板件 |
|
PWM 信号 |
橙色 |
黄色 |
|
+6V |
红色 |
红色 |
|
GND |
棕色 |
黑色 |
校准电机时,将电机连接到控制器板并通电。电机将会移动到相关位置,随后您可以在轴上划一条线,以便与伺服电机对齐。此特定伺服执行器和机械臂可以按照说明所示位置进行定位。
底座的装配
用接线穿过开孔,让中间伺服环 3 穿过伺服电机。使用 2 颗 8mm 螺丝将枢轴伺服板 2 固定到组件上,请参阅《MeArm 和 Arduino 组合使用指南》中的示意图。
从底座下方将 4 颗 20mm 螺丝推入机械臂底座 1 中。为每颗螺丝拧上螺母,并向下拧紧,然后将这些螺丝拧入伺服板 2 中(伺服电机保持悬挂)。只需要将这些螺丝拧紧到与伺服板齐平即可,然后沿着螺丝向下拧紧螺母,一直拧入机械臂底座并固定。
左侧伺服电机的装配
用接线穿过开孔,使左臂伺服电机位于伺服环 5 中。让伺服接头和软接线穿过伺服环中的方孔。使用 2 颗 8mm 螺丝固定到左臂伺服板 4 上。

使用伺服电机袋中的 2 颗自攻螺钉,将一个黑色双伺服执行器固定到长伺服臂 6 上。牢固拧紧,但不要过度拧紧。此时,将其定位在左伺服电机上大约 9 点钟的位置。您可以使用伺服控制器操纵杆测试操作是否正确,以及是否会干扰底座等其他部件。然后可以插入伺服电机袋中的机械螺丝,并用小型十字螺丝刀拧紧。
右侧伺服电机的装配
按照与左侧伺服电机同样的方式,使用伺服环 5、2 颗 8mm 螺丝和右臂伺服板 12 安装右侧伺服电机。将一个黑色双伺服执行器固定到右侧伺服臂底座接头 13 上。此时,将其定位在右侧伺服电机上大约 12 点钟的位置,并用各个机械螺丝固定好。再次使用控制器检查操作。使用一颗 6mm 螺丝将平行连杆 17 固定到右臂伺服板 12 顶部的基座上,使其能够自由移动。
Pig 组件的装配
这需要使用左臂基座 8,通过一颗 10mm 螺丝固定住左臂基座接头 10 和短臂 9。该组件应该能够自由移动。
机械臂底板 14 的装配
使用伺服电机袋中的 2 颗自攻螺丝,将一个黑色双伺服执行器固定到机械臂底板上。
这 5 个子组件如下图所示(从左上方顺时针看):
图中依次是固定件和螺丝规格指南、左伺服电机组件、Pig 组件、机械臂底板组件(注意,此处所示的伺服电机只是用于测试夹爪伺服是否合适,该底板最终会安装在枢轴板上的中间伺服电机上)、右伺服电机组件、底座组件。

机械臂底板组件
我们现在将左伺服电机组件与前臂横梁、Pig 组件、机械臂底板和后臂基座横梁组装在一起。
首先,使用一颗 12mm 螺丝和螺母将前臂基座横梁固定到左臂伺服板 4 组件上,横梁中的偏置开孔应该略微靠近左伺服板组件。基座的螺丝和螺母不要完全拧紧,这有利于组装底板组件,等到完成全部组装时,最后拧紧即可。
此时定位 Pig 组件 8,仔细对齐凹槽,将一颗 12mm 螺丝先后穿过伺服臂 6 和平行连杆 17,添加一个垫片 20,最后将其拧入 Pig 组件上已安装的短臂 9 中。完成该操作之后,我注意到伺服臂相对于伺服电机有轻微偏移。我随后使用多个小垫圈替换了垫片,将偏移减少至最初的一半左右。该机械臂随后将依靠电机平稳运动。
将机械臂底板 14 以一定角度插入左臂伺服板中,并将连杆固定在 Pig 组件的选择器接头上。确保之前使用的 12mm 紧固螺丝采用宽松设计,有助于支持该操作。
此时可以插进后臂基座横梁 11 以锁定 Pig 组件,然后用另一颗 12mm 螺丝和螺母固定住。
接下来需要将左右组件组合在一起。首先,使用一颗 12mm 螺丝和螺母将主臂横宽板 15 固定到左臂基座接头 10 上。此时横宽板可以安装到右臂基座接头 13 上,让两个臂组合在一起时,然后再使用一颗 12mm 螺丝和螺母进行固定。
最后,通过小心调整右臂伺服板 12 组件对齐并固定到臂底板 14 以及前后臂基座横梁 7 和 11 上。松开现有 12mm 固定件有助于将其调整到合适的水平。最后,使用 2 颗 12mm 螺丝和螺母固定住右伺服板。现在,可以拧紧所有固定件,并且下部组件已装配完毕。12mm 螺丝和螺母组件的最佳紧固方式是:首先插入螺丝,然后将螺母插入横梁凹槽中,并用拇指和食指固定螺母,最后使用另一只手对齐并拧入螺丝即可。


可以通过将伺服电机连接到控制器板并通电,完成校准。该组件应该对齐到大约 12 点钟的位置,将 MeArm 基座保持在正确的方向。将使用电机随附机械螺丝的伺服固定到使用小型十字头螺丝刀的电机。此时,可以为控制器通电,检查操纵杆的操作是否正确。这个环节可以轻松进行任何微调。
接下来,将左侧长腕关节 16 的端部(最靠近中间孔的位置)固定到平行连杆 17(已安装在基座组件上)。将偏心孔固定到左臂基座接头 10 的顶部,二者均使用 6mm 螺丝。
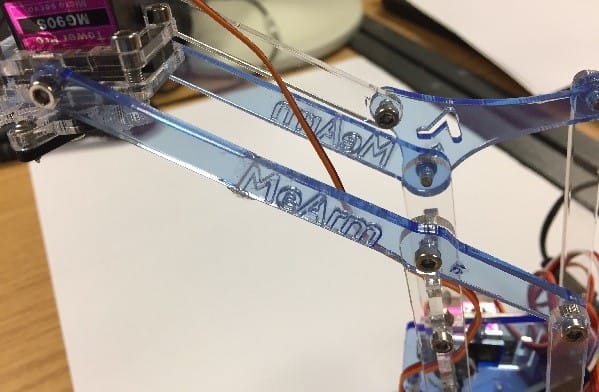
在右侧,使用一颗 10mm 螺丝将平行连杆接头 19 固定到右侧腕关节和平行连杆接头上。使用一颗 10mm 螺丝和垫片 20 固定右伺服板的平行连杆 17。使用一颗 6mm 螺丝将新的平行连杆接头 17 固定到平行连杆接头 19。

图中显示的是平行连杆接头的装配
夹爪装置的装配
将顶部夹紧伺服环 21 滑到伺服电机上。
将右腕附件 23 和左腕附件 22 仔细定位到伺服电机的侧面,使底部夹紧伺服基座 24 位于这些附件和伺服电机的上方。
此时将 4 颗 8mm 螺丝拧入底部夹紧伺服基座中,将其夹紧在一起。
使用一颗 8mm 螺丝将左夹爪 28 固定到夹爪板 25 上,同时插入一颗 12mm 螺丝将其固定到位,但是不要拧紧。
将单颗自攻螺丝(位于伺服固定包中)拧入长凹槽中,将单伺服执行器臂固定到顶部伺服齿轮 30。
固定到经过校准的夹爪伺服电机之后,伺服臂应该指向 6 点钟位置,且夹爪位于 12 点钟位置。(装配完毕后,可使用控制器轻松测试夹爪的操作,并可调整位置让夹爪实现最佳移动。)
使用 6mm 螺丝连接底部伺服齿轮 29。
此时使用一颗 8mm 螺丝从下方安装夹爪齿轮 26,并拧入之前已安装的 12mm 螺丝。
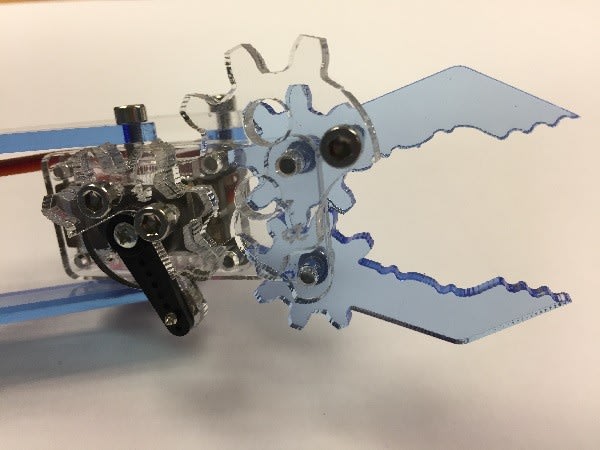
当校准的伺服齿轮啮合时,夹爪应张开 90 度。
现在,在最终拧紧之前,最好使用控制器来测试夹爪的操作情况。我对伺服电机上的位置进行了一些调整,优化了夹爪操作。
此时整个夹爪组件都可以连接到机械臂装置上。
首先把一颗 8mm 螺丝拧入右腕附件 23 中,使夹爪固定到右腕关节 31 上。(装配指南中的图纸指明了准确的位置。)
接下来,使用一颗 8mm 螺丝将平行连杆 17 固定到右腕附件 23 上方点,并用垫片 20 正确对齐机械臂。
最后,使用一颗 8mm 螺丝将左腕关节 16 固定到左腕附件 22。
伺服夹爪线缆应该穿过主臂横宽板 15 的开孔,然后连接随附的延伸线缆,以便接到 Arduino 控制器板。确保保持正确的连接。
Arduino 控制器板此时可以通过 4 个安装孔和垫圈螺母装到基座板 1 上。
所有伺服线缆此时都可以最终连接到 Arduino 控制器板。
现在一切准备就绪。
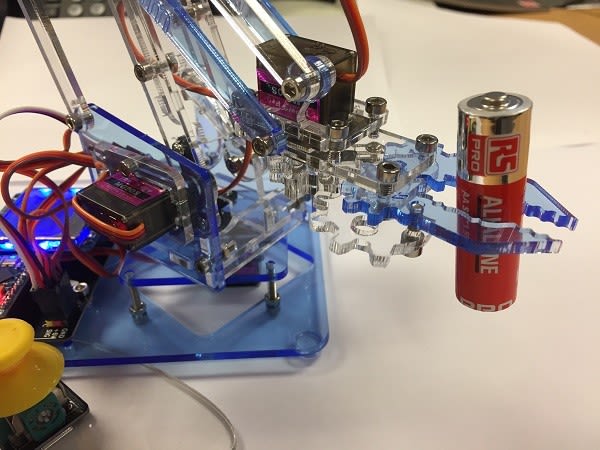
通电之后,伺服电机将移动到校准点,然后,您可以使用操纵杆控制器自由移动机械臂。
右控制按钮负责机械臂上下移动以及张开和闭合夹爪,左控制按钮负责前进和后退运动以及顺时针和逆时针旋转。
只要稍加练习,就能轻松夹起各个物体并向四周移动。操纵杆自然支持轻松、快速地练习操作。
总而言之,机械臂的表现出色抢眼。您还可以进一步为控制器编程,以便按需完成一些特定动作,甚至还可将其集成在自定义设计和项目中。