一起制作桌面树莓派自拍照相机
关注文章
 戴夫来自 DesignSpark
戴夫来自 DesignSpark
你觉得这篇文章怎么样? 帮助我们为您提供更好的内容。
戴夫来自 DesignSpark
Thank you! Your feedback has been received.
戴夫来自 DesignSpark
There was a problem submitting your feedback, please try again later.
戴夫来自 DesignSpark
你觉得这篇文章怎么样?
一个使用树莓派 3加触摸屏显示器 、镜头和SenseHAT的有趣项目
在这篇文章中,我们将会介绍一个容易完成的项目,它只需要使用四个官方的树莓派产品,便可以创建一个桌面“自拍”相机。另外一点有趣的地方是它不需要焊接或定制任何电子零件。此外,很多软件都支援到它的硬件,所以软件应用程序也是超级简单的。
硬件

整个项目使用了下列的零件:
- 树莓派3型号B
- 树莓派触摸屏
- 树莓派相机
- SenseHAT
- 电源
- 32GB Micro SD 卡
另外还配搭了定制激光切割和折叠亚克力盒。即使你没有激光切割机和亚克力文件夹,也可以使用其他的外壳替代。
O/S及相关
把Raspbian Jessie Lite写入一张Micro SD卡中,然后将主机名由简单的raspberrypi更改为其他名称,编辑根文件系统etc/hostname和etc/hosts文件就可以。这样在网络上会更容易找到主机。
openssh服务器现在默认为禁用,因为我更喜欢通过SSH进行登录,这可以通过在boot partition中创建一个名为ssh的空文件来启用它。
触摸屏技术上是上下倒转安装的,所以要将显示器旋转到正确的方向,有必要编辑config.txt - 也在启动分区,并添加行:
lcd_rotate=2
接下来将Micro SD卡插入Raspberry Pi并接通电源。之后,我建议按照惯例做法,通过登录并输入以下内容更新O / S:
$ sudo apt get update
$ sudo apt-get dist-upgrade
请注意,由于我们已将主机名更改为selfiecam,因此可以从另一台Linux计算机使用以下命令登录到Pi:
$ ssh pi@selfiecam.local
由于我们想使用SenseHAT,相机和帧缓冲区,一些有用的Python软件也通过安装:
$ sudo apt-get install sense-hat python-picamera python-pygame
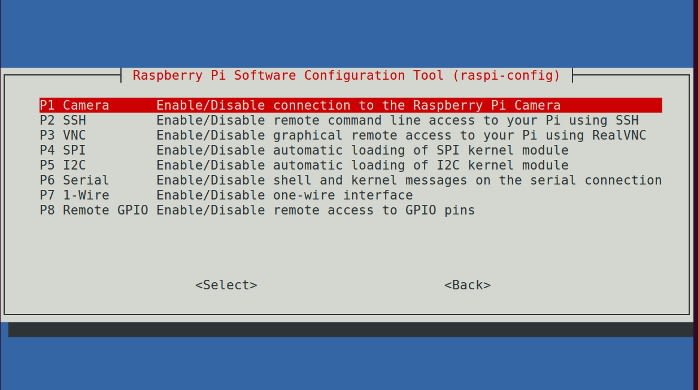
最后,需要启用相机和重新启动,这可以透过raspi-config完成:
$ sudo raspi-config
软件

首先,我们需要导入一些库,其中包括上面提到的。
import os
import time
import pygame
from picamera import PiCamera
from sense_hat import SenseHat
我们需要初始化Pygame,它将用来显示图像到帧缓冲区中(显示器)。
pygame.init()
screen = pygame.display.set_mode([800,480])
接下来我们设置摄像机,由于它的物理位置被水平翻转,我们需要通过软件翻转它。
camera = PiCamera()
camera.resolution = (800, 480)
camera.hflip = True
之后配置SenseHAT。
sense = SenseHat()
sense.set_rotation(0)
接下来我们将会定义一个函数,把其中一个文件作为参数,然后使用Pygame来绘制屏幕变成黑色,然后再显示它包含的图像。
def displayImage(file):
image = pygame.image.load(file)
imagerect = image.get_rect()
screen.fill([0, 0, 0])
screen.blit(image, imagerect)
pygame.display.flip()
然后我们定义一个功能,启用视频预览,在SenseHAT LED矩阵上显示3-2-1-0倒计时,截取静止图像前,停止预览,显示图像,並清除LED矩阵。映像文件名中应包含日期和时间。
def getSelfie():
# Start camera video preview
camera.start_preview()
# Commence countdown
sense.show_letter("3", text_colour=[255, 0, 0])
time.sleep(1)
sense.show_letter("2", text_colour=[255, 255, 0])
time.sleep(1)
sense.show_letter("1", text_colour=[0, 255, 0])
time.sleep(1)
sense.show_letter("0", text_colour=[0, 0, 255])
# Capture image and stop preview
filename = time.strftime("/selfies/%Y-%m-%d-%H-%M-%S.jpg")
camera.capture(filename)
camera.stop_preview()
# Display image and clear SenseHAT display
displayImage(filename)
sense.clear()
请注意,LED矩阵上显示的数字颜色是不同的:3 =红色,2 =黄色,1 =绿色,0 =蓝色。
到目前为止,我们只是导入了不同的库和定义函数。接下来,我们将使用displayImage()這个函数在启动时更新触摸屏显示欢迎图像。
displayImage("/usr/local/share/images/Welcome.png")
最后,我们进入程序的主循环。在这里,我们等待来自SenseHAT操纵杆的动作。如果这被按住,我们需要等待它被释放后使用getSelfie()函数。如果它被一直保持在左边,我们直接关机。我们可以忽略其他相关动作。
while True:
# Wait for and process joystick events
event = sense.stick.wait_for_event(emptybuffer=True)
if event.direction == "middle" and event.action == "released":
getSelfie()
elif event.direction == "left" and event.action == "held":
os.system("/sbin/shutdown -h now")
else:
pass
运行

/etc/rc.local文件在启动时运行,在这文件添加一行代码防止屏幕自动关闭,接着一秒后会启动自拍照相机应用程序。
sudo sh -c "TERM=linux setterm -blank 0 >/dev/tty0"
/usr/local/bin/selfie.py &
重新启动后,我们会看到我们设定的欢迎图像。按下操纵杆时,会显示实时视频预览,并开始倒數计时。

在倒数到零时将会拍照,并停止视频预览,图像会显示在屏幕上。

最后图像可以从SD卡中复制出来。

简单! :o)
如果你想自己做这个项目,可以在GitHub上找到Python脚本和亞克力外壳的设计文件。