Remote Flying Fish Project Part 17: Flight Test and Fine-tuning
Follow article Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
After all these days, you shall have your parts ready, right? If not, please take a look at the tips and thoughts section below.
Tips and Thoughts
1. If the soldering section is not going smooth as expected, you might start with some other tiny project that requires minimal work of soldering to get more experienced before coming back for a second try. Tiny projects could be like controlling LED mounted on prototype PCB (391-7260) controlled by Arduino.
2. Sometimes the components might malfunction because of different reasons including burnout, bad connection, shorted pins, etc. As the components we used are all SMD, it would be wise to first test their functionality with a socket adapter. For example, the DC-DC converter one, which is an 8-pin SOP. Then we could make use of this adapter (158-2878) .
3. Remember the alternative way I mentioned in Chapter 9? That's actually simply: do not follow through every step of this tutorial (and sometimes other tutorials as well), think out of the box. For example, use a well built DC-DC converter module directly. Another example, Arduino board not being flashed correctly if we try to flash it with the new programme when it is still connected to the circuit as the TX/RX pins are in connection with the BLE module.
4. Add anything else you want! Like extra LEDs or a small buzzer, which will definitely enrich the functionality of the outcome! Of course, do remember weight is the limiting factor in this case.
===============================================SEPARATOR================================================
So now it is time to literally making them into flying fish.
So, the first thing you need to do is balloon inflation.
**REMINDER: Tie a string to the fish before inflation
After inflation, mount all the parts onto the fish as shown below.

Next, attach the PCB part with the balloon.

Then, simply inflate the balloon when you are ready for the flight test.
You might need to add extra weight to the fish to keep it stasis in the air if it keeps float up when all motors are off so that it won't leave you and fly toward the sky.
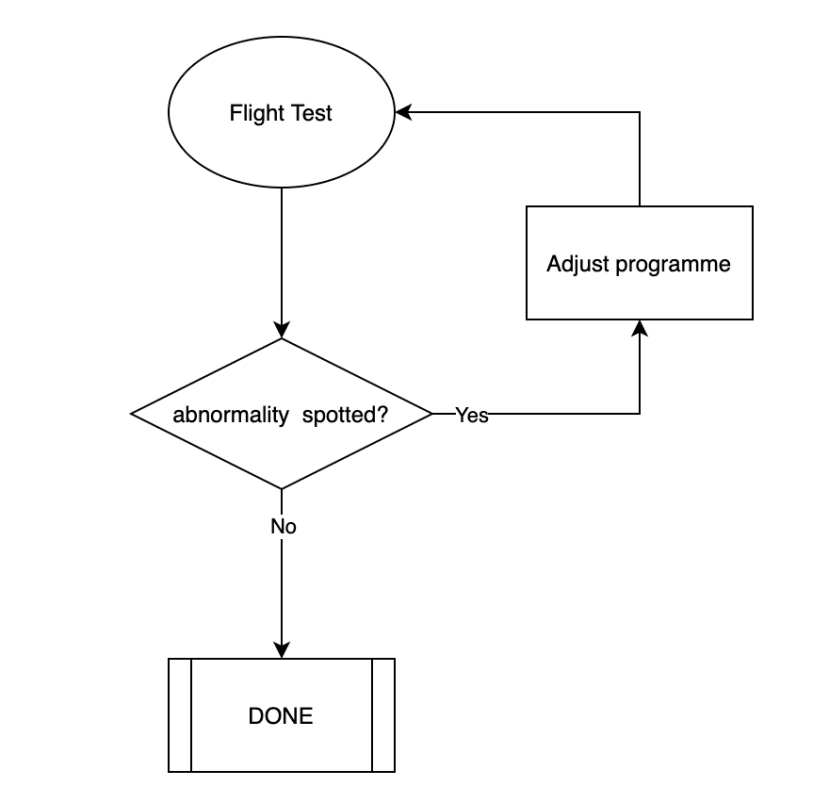
Flight Testing
Now everything is good to go, power on your circuit by putting on the shunt and connect the Bluetooth module with your mobile app!
See if the fish could fly around fluently under your control.
Fine-tuning
Also, try to spot if any abnormality, and change the Arudino programme accordingly.
Here is a list of possible observations you may have:
- Fish cannot move straight forward
- Fish cannot turn left/right
- Fish cannot descend
Sometimes the abnormality might not be related to the software part but the hardware part instead. For instance, the orientation of the propeller motors is tilted.
Miscellaneous
- Fish will deflate gradually over time, so make sure it is 95%+ filled before flying. However, overinflation might cause balloon damage thus gas leakage.
- Attempting to play outdoor is risky, as a strong wind may take away your fish.
In the end, you should be able to fly your fish like the students competing in the following video do.
[Credit to City University of Hong Kong]
Here is the end of this DIY series. If you liked it, do not hesitate to give a thumbs up and share it with your friends.
Your enjoyment will always be our motivation to keep on making this kind of tutorial.
Great thanks to all your subscription. And see you somewhere else! Cheers~
Parts in this series
- Remote Flying Fish Project Part 1: Introduction
- Remote Flying Fish Project Part 2: DIY Series - Arduino Testing
- Remote Flying Fish Project Part 3: Motor Testing
- Remote Flying Fish Project Part 4: Bluetooth Testing
- Remote Flying Fish Project Part 5: Motor Testing with Remote XY
- Remote Flying Fish Project Part 6: PCB Design (preparatory)
- Remote Flying Fish Project Part 7: PCB Design (Schematic)
- Remote Flying Fish Project Part 8: PCB Design (PCB Layout)
- Remote Flying Fish Project Part 9: Soldering and Arduino Programming
- Remote Flying Fish Project Part 10: Flutter Introduction
- Remote Flying Fish Project Part 11: Flutter Installation on MacOS
- Remote Flying Fish Project Part 12: Flutter Installation on Windows
- Remote Flying Fish Project Part 13: Get yourself a Git
- Remote Flying Fish Project Part 14: Flutter UI Design
- Remote Flying Fish Project Part 15: Bluetooth in Flutter
- Remote Flying Fish Project Part 16: 3D printing for propeller protector
- Remote Flying Fish Project Part 17: Flight Test and Fine-tuning