组装Braccio - TinkerKit机械臂
关注文章
 戴夫来自 DesignSpark
戴夫来自 DesignSpark
你觉得这篇文章怎么样? 帮助我们为您提供更好的内容。
戴夫来自 DesignSpark
Thank you! Your feedback has been received.
戴夫来自 DesignSpark
There was a problem submitting your feedback, please try again later.
戴夫来自 DesignSpark
你觉得这篇文章怎么样?
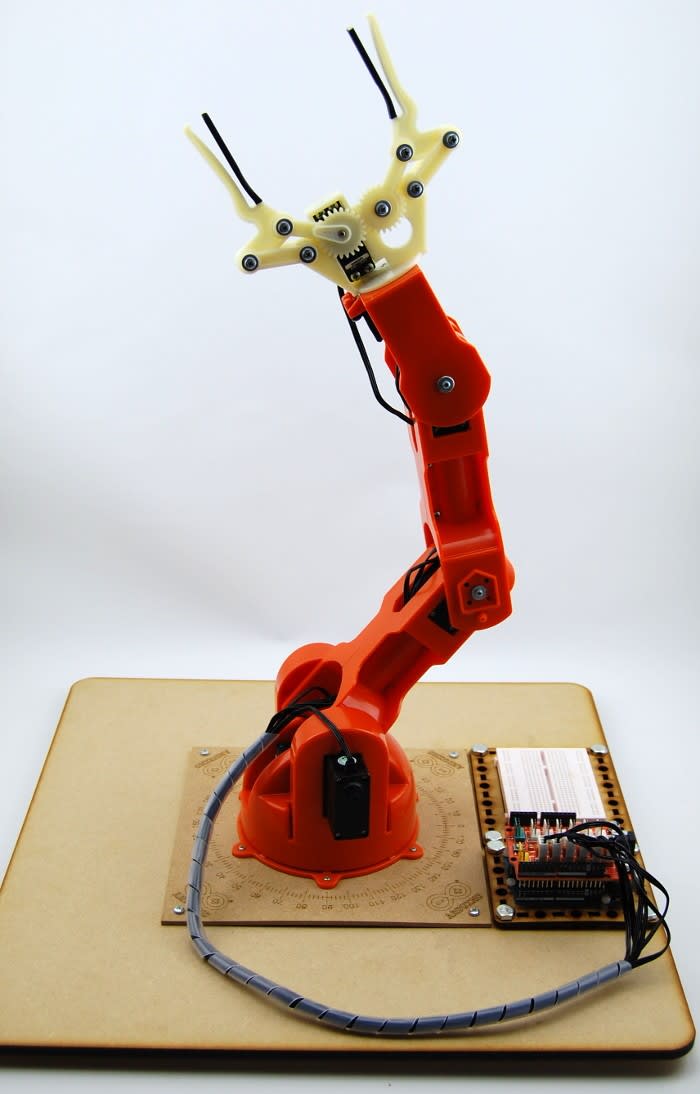
一起装配,测试和驱动由Arduino控制的TinkerKit机械臂套件测试和驱动。
Braccio是意大利文,意思是手臂,Braccio是一套要自己动手组装和使用Arduino和扩展板控制的机械臂套件。机械臂包含一共6个伺服马达:
- M1 - 基座
- M2 - 肩
- M3 - 肘
- M4 - 垂腕
- M5 - 旋转手腕
- M6 – 抓取器
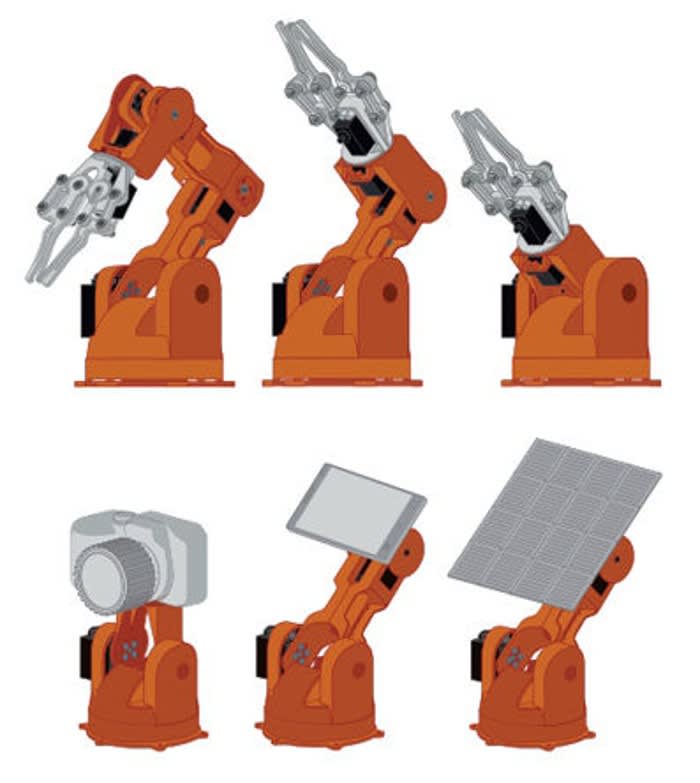
Braccio可以有几种组装方式,这取决于所需的应用方法,也可以在机械臂的端部换成各种物件。例如,你可以使用Braccio:
- 用你的相机跟随物件
- 安装你的电话或平板电脑,让它在视讯会议中跟着你
- 安装太阳能电池板来跟随太阳
组装Braccio
总体来说,Braccio的装配是相当简单的,虽然有点棘手的地方,而且在某一些阶段中可能需要有多一只手帮忙!
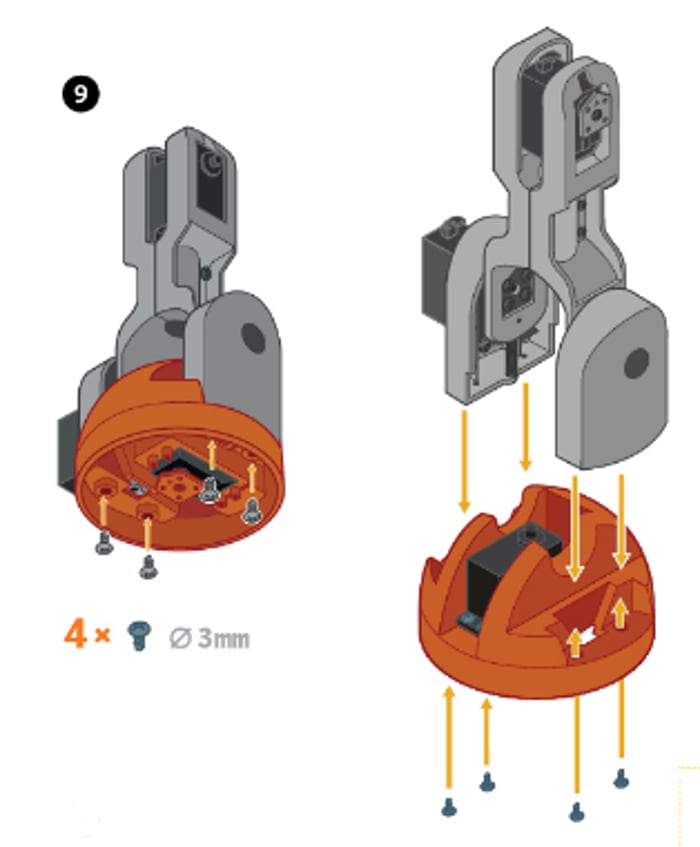
在组装指引中的第九个步骤,有一幅图像有点误导,因为臂的底部展出的方向与其他步骤是不同的。不幸的是,我没有注意到这一点,直到我已差不多完成第15个步骤。希望这会在未来的装配指南进行改善,让其他人在组装时不会有同样的问题。
另外需要注意的一点是,指南中没有提及到马达的电线可以放在手臂的中间整齐地收藏好。我决定要等到我已经完成组装才收起电线,以防止电线纠缠不清。
当我完成组装机械臂后,我把它固定在套件中提供的激光切割密度板上,并开始测试。然后我注意到,当手臂未通电时,由于重力它有点难去保持直立。为了让它移动时可以防止手臂翻倒,我决定由中密度板切割一块较大底板并把机械臂安装在上面,这将有助于稳定它。

当切割底板时,我也预计了Arduino及面包板的安装孔,以备未来的项目使用。
我完成组装机械臂后便拍摄了组装教学影片,以提供更多的细节。这个影片可以在arduino.org或在下面找到。
看看资料库
- M1:底座 - 90度
- M2:肩 - 45度
- M3:手肘 - 180度
- M4:手腕垂直 - 180度
- M5:手腕旋转 - 90度
- M6:爪 - 10度
Braccio.servoMovement让你透过一个命令控制所有Braccio的伺服,包括每个伺服在每一步开始时的移动会有一毫秒的延迟,然后各个马达会移动到相对的角度。步骤延迟和每个马达的参数,可以在下面找到:
步骤延迟:从10到30毫秒的值。
- M1:基度 - 0到180度之间的范围
- M2:肩度 - 15到165度之间的范围
- M3:手肘度 - 0到180度之间的范围
- M4:手腕垂直度 - 0到180度之间的范围
- M5:手腕旋转度 - 0到180度之间的范围
- M6:爪度 - 10到73度之间的范围。 (数值10表示爪是打开,73的值表示爪关闭)。
测试时间
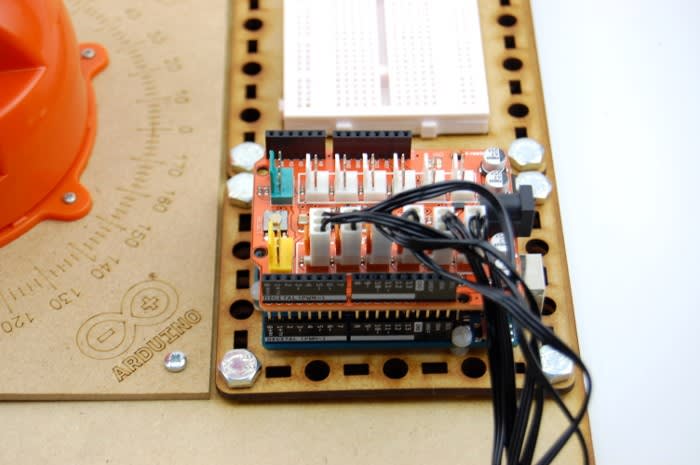
为了控制Braccio,我决定使用所提供的扩充板和Arduino Uno板,只是因为是随手就有。在套件中的扩充板是兼容所有UNO R3引脚排列的主板。
因为我当时用的是旧版本的Arduino IDE,我需要下载更新版本。 Braccio 只能支持Arduino IDE 1.7.9或更高版本,1.7.10是当前可用的。我决定我将运行一些在IDE中的实例以开始检查一切是否运作正常。
首先我运行了testBraccio90这个程式,这可以对齐6个伺服马达成直立的位置。当我供电给机械臂时,我注意到一些伺服马达不太一致。要对齐伺服马达,我不得不拆除手臂和手动移动马达上的塑料附件。不幸的是,我没有这个运气去把它们对齐至它们原本那么直。

在理想情况下,组装机械臂前你应该尽可能对准伺服马达。这可以透过连接6个电机至Arduino上的扩展板并上传testBraccio990程式。
在此之后,我决定尝试simpleMovements程式并运行得很好。于是我运行另一个程式takethesponge,最初这似乎还可以的,但是当它返回到起始位置,它抓着安装板及敲击其掌握的海绵。为了尝试解决这个问题,我在程式里改变了第二至最后一个移动角度,我把 M2的马达移动从90度改至100度,希望这将解决这个问题。我重新开启机械臂后发现这使问题变得更糟,我意识到我需要减少马达的角度,而不是增加,所以后来我改到75度,这给了足够的空间让机械臂回到开始位置。我敢肯定如果伺服马达已经完全对准就不会出现这个问题。

可能的项目
我觉得有一个项目可以尝试使用Braccio机器臂,就是官方的Arduino机器人,约翰尼6。我了解约翰尼6以前的项目后,我很快意识到约翰尼6不能承受额外的重量。所以我认为将两个机器人合并的话会十分棒,但我可能需要想出更多用Braccio建立的项目!