古い飛行機のロータリーインバータシステムを構築!Part2:組み立て編
この記事を購読
 Dave from DesignSpark
Dave from DesignSpark
こちらの記事について、内容・翻訳・視点・長さなど、皆様のご意見をお送りください。今後の記事製作の参考にしたいと思います。
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
こちらの記事の感想をお聞かせください。

古い飛行機用のロータリインバータの制御系と筐体を組み立てる
このシリーズのPart1では古い飛行機用のロータリインバータ(回転変流器)を取り上げ、インバータの界磁コイルの電流を制御する適切な制御回路を設計し、BARTH社のlococube mini-PLCについて導入方法などを解析した後、どのような制御を実行できるかを調査しました。今回は制御ハードウェアの設計とシステム全体を収める適切な筐体の設計行います。
電流制御基板
Part1では出力パス段階に向けて2つのオペアンプ(演算増幅器)と1つのMOSFETを用いてハイサイド電流源を設計し、シミュレーションを行いました。シミュレーションではこの回路は期待通りに動作しているように見えましたが、実際にストリップボード (100-4328) 上に回路を構成してみると自己発振してしまい、回路を調整しても調整してもこれを止めることができませんでした。こういった現象はシミュレーションではよくある事で、完全なプリント基板を作成する前にプロトタイピングをして原因や対策を考える必要があります。

自己発振現象を抑えるために、シンプルな4トランジスタのレギュレータに変更する事にしました。このレギュレータを使用することにより組み立て難さは少し増しましたが、オペアンプベースの回路に見られた自己発振の問題は発生しませんでした。シミュレーションの結果、この回路は期待通りの性能を発揮しモータと発電機の両方の界磁巻線を駆動するのに十分な出力電流を得られることが分かりました。
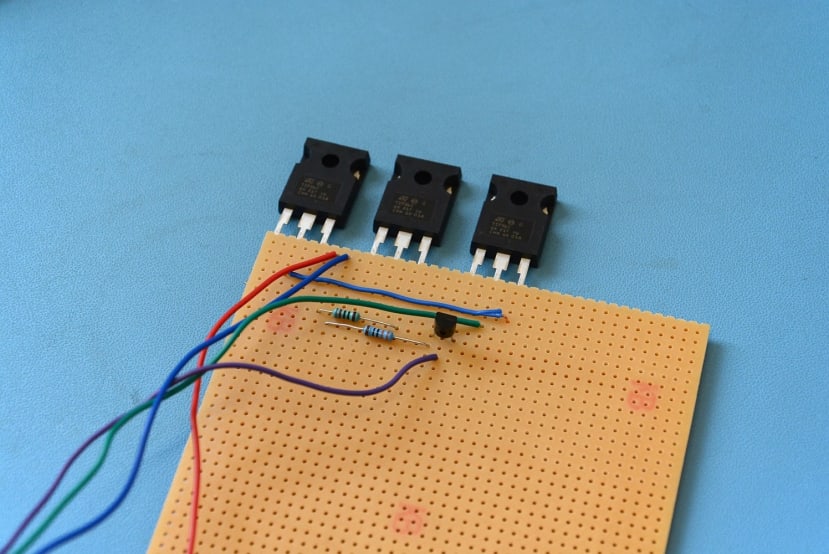
念のためこの回路もストリップボードで試作し、ヒートシンクにトランジスタを固定する電位固定法(パッチクランプ法)を使用しテストに臨みました。テストの結果からこの回路は期待通りに動作することが示されました。この時点で回路図の取り込みとプリント基板のレイアウトを決定しました。
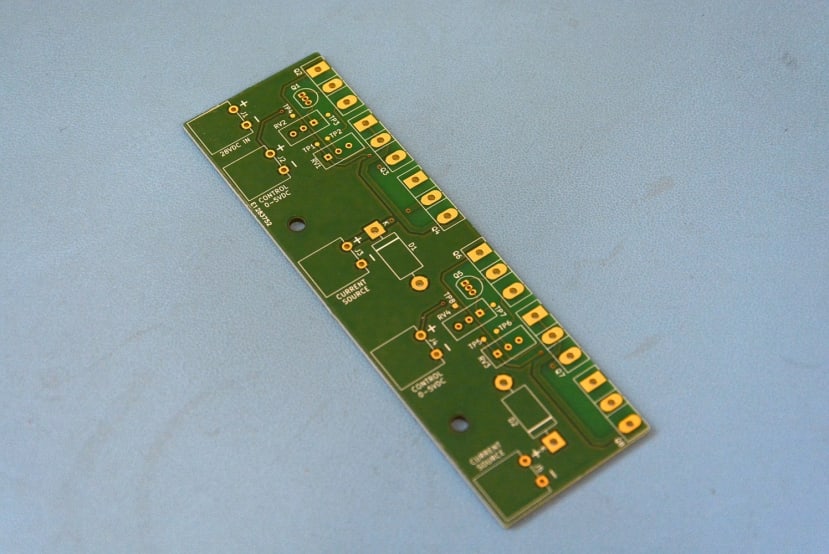
プリント基板の回路配置プロセス中に、固定値の抵抗器を25回転可能な可変抵抗器 (181-4455) に変更することにしました。これにより回路に流れる電流を調整し、出力電流範囲を調整できるようにしました。
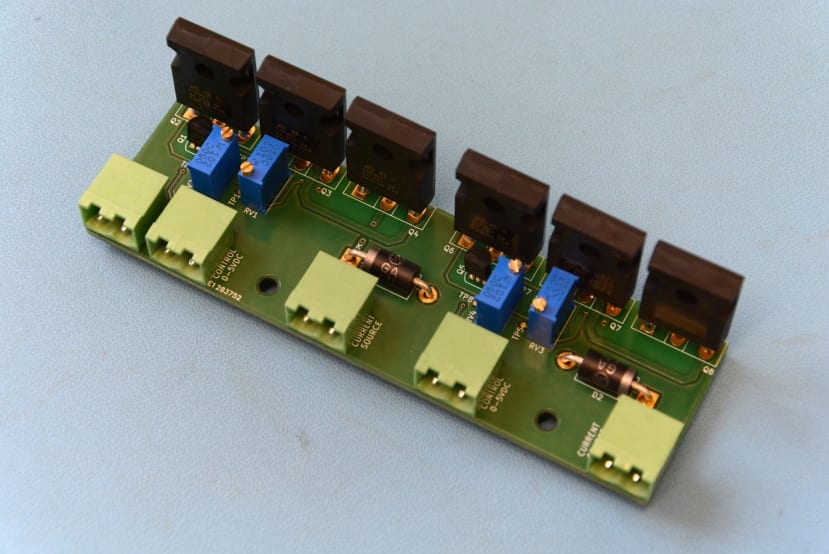
プリント基板を完全に組み立てた後、お得意のRS Pro電気負荷 (180-8788) を使って回路のテストを行いました。負荷は不変抵抗モードに設定して界磁巻線の代わりにしました。トランジスタは再度ヒートシンクに固定し、回路をしばらく放置してテストしていましたが、特に悪影響はありませんでした。その後ポテンショメータを調整して希望する出力電流が得られるようにし回路はそのままにして、インバータの残りの部分を設計しました。
その他の制御装置
インバータの界磁巻線に流れる電流を制御する回路ができたので、これを中心に制御システムを設計していきます。このシステムの心臓部はBARTH社が提供する2台のlococube mini-PLCs (134-8867) です。出力電圧と周波数を監視し、界磁巻線に流れる電流を調整するほか、故障の監視や起動シーケンスなどシステムの機能も実行します。
最初のステップは制御装置に送る適切な電源を選ぶことです。界磁巻線の制御回路には36Vで約3A(界磁巻線に電流を流すのに十分な電圧)、PLCやパネルメータ、コンタクタ(接触器)、インジケータランプなどその他の制御系には24Vで2Aを供給する必要があります。今回はRS Pro 36V 155W PSU (161-8300) とRS Pro 24V 52W PSU (161-8281) を使用することにしました。これらの電源は必要な出力電圧・電流を確保しつつ、リーズナブルな価格帯となっています。
出力電圧、周波数、電流を監視するためにTrumeter APMシリーズの5パネルメータAPM-VOLT-ANO (815-8306) 、APM-FREQ-ANO (815-8330) 及びAPM-AMP-ANO (815-8321) を選びました。これらのメータはUSBで設定でき、2つの出力(うち一つは4-20mAの電流ループを提供するように設定可能)を備えています。これらのコンポーネントを選んだのは従来の可動コイルメータを真似たLCDディスプレイ表示を提供するだけでなく、PLCによって容易に使用できる出力も同時に提供する事ができるからです。*単純な信号調節だけで (884-2458) により0-10Vの信号に変換可能です。
注意点としてはAPM-AMP-ANOメータは回路電圧が60Vdc又は30Vacを超える電流は直接測定できないのでカレントトランス(変流器)が必要になる事です。この場合、ロータリインバータの出力電流は3.1A未満とされていますので、5:5のカレントトランスを使用します。今回は (171-8855) を選びました。
筐体の設計
当初の筐体計画ではこのような19インチラックマウント筐体を使用し、インバータを天板に配置したアルミ製の押し出しフレーム内にラック筐体を搭載する予定でした。

雑にモックアップスケッチを作成した後、5Uの筐体でも設計しているコントロールレイアウトを実現するのに十分なスペースが無いと判断し、代わりに押出フレームに直接ボルト止めする特注のフロントパネルを使用する事にしました。

2回目の試作では5つのメータが並びその下にすべてのユーザーコントロールを配置でき、より思い描いたものに近づきました。その後さらに設計を練り直しスペースの調整、コネクタの配置、操作系の追加を行いました。

フロントパネルのレンダリングが作成され、その後物理プロトタイピングをMDFで作る事にしました。レーザーカットは社内でできますし、パネルをアルミから削り出してから間違いを確認するのに比べ安価でリスクも少ないです。

MDF製の試作版にすべてのパーツをはめ込んで、スイッチの接点ブロックやパネルメータの間隔に問題が無いことを確認できました。次にフロントパネルをアルミで作り制御系を組み立てていきます。
制御理論
この制御システムは2つのほぼ独立した制御システムで、それぞれが1つのPLCで制御されていると見なすことができます。これにより2つの制御システムの間では一部の信号伝達が行われるだけで、各制御システムの要件を簡素化する事ができます。1つ目のPLCはモータ界磁巻線の制御が必要な出力周波数の調整を行い、2つ目のPLCは発電機の界磁巻線を調節することで出力電圧の調整を行うものです。
パワーシーケンスも電機子が有効化される前にモータの界磁巻線に印加した電源で管理する必要があり、そうしなければモータが大きなヒーターとして働くことになります。これはモータの寿命に影響を及ぼすだけでなく、オーバーヒート(過熱)を引き起こす可能性もあります。
モータが始動したら発電機の界磁巻線をオンにする事が可能になり、所望の出力電圧と周波数が生成され始めます。この時点で電圧と周波数を安定化させ、出力を有効にすることができます。
また出力が希望の電圧・周波数範囲から外れた場合、出力を遮断しインバータと機器の両方を保護する事が可能です。またPLCはインバータの温度を監視し、熱くなりすぎた場合は負荷を切断することができます。インバータを冷却するための遠心送風機が内蔵されているので無負荷で稼働させておくと冷却が効果的に行えます。
プロトタイプ操作パネルのビデオ
下のビデオでは、出力の周波数に応じてモータの界磁巻線を出力の周波数に応じて制御する基本的な動作のPLCプログラムを実演しています。
次のステップへ
この記事では制御システムの設計を筐体の構造について見てきました。次回は組み立てを終えロータリインバータの動作確認をやっていきます!