
 Dave from DesignSpark
Dave from DesignSpark
こちらの記事について、内容・翻訳・視点・長さなど、皆様のご意見をお送りください。今後の記事製作の参考にしたいと思います。
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
こちらの記事の感想をお聞かせください。
今回紹介するのはロボットアーム組立キット「MeArm」だ。「MeArm」はMime Industries社が新発売したロボットアーム組み立てキットだ。オープンソースで公開されているのでArduino、Raspberry Pi、Beagleboneなど、使い慣れたコントローラで制御できるため、個人的なプロジェクトで使うのちょうどよい製品だ。さらに、フラットシート素材から切り出して工業用パーツを製作すれば、ロボットのアームの設計を自分でカスタマイズすることも可能である。今回の紹介を通して、その小さなアームがどうやって動くのか、その仕組みについても理解したい。
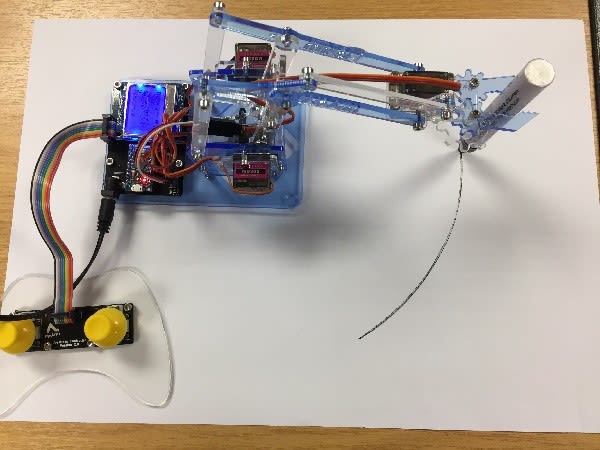
キットには、ロボットアームを完全に組み立てるのに必要なすべてのパーツとコントローラボード「Me Brain」が付属している。他に必要なものは、サーボホーンの固定ねじを締めるための小型のプラスドライバと4 AAバッテリだけだ。ちなみに、私が使用したバッテリはRS Pro Alkalineバッテリ(744-2199)だ。

組み立て始めよう
まずは開封してキットの部品がすべて揃っていることを確認する。


- サーボモータ4個 (各種サーボアームを同封)、およびこれらの部品の固定具
- コントローラボード「Me Brain」(アーム用にプログラムされたArduino対応ボード)
- 組み立てに必要なすべての固定具
- バッテリボックス(コントローラ接続用リード付き)
- 接続リード
- ジョイスティックコントローラ用ボタン2個
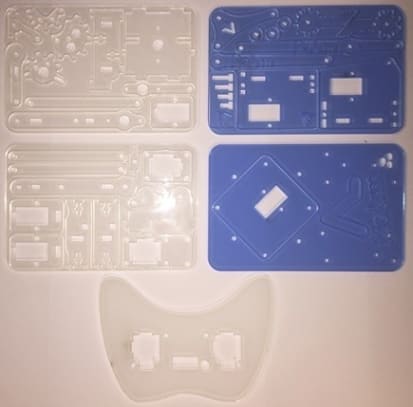
- アクリルパーツ(4枚のシートにカット済み)とジョイスティックコントローラ用ベース
組み立てを始める前に、フィルムをアクリルパーツから剥がしておくことが重要だ。プラスチックフィルムが残っていると、組み立てるときにジョイントが巻き付けられてしまうためだ。
また、組み立ての際には、ねじを締めすぎないようにしてほしい。もちろん、ねじを締めてしっかり固定する必要があるが、強く締めすぎると、ねじがアクリルパーツにめり込み、パーツを壊してしまう可能性がある。フレキシブル固定具はリンク・アーム・ギアピボットなどの間を動けるようにし、回転する動きが制限されないように、『すき間ばめ』をする必要がある。このすき間がきつくなると、うまく動かなくなり、サーボモータに過剰な負荷がかかってしまう。
この投稿では、下記の2つの組み立てガイド(英語)を参考にした。これらはこの記事の最後に添付しておく。
『Guide to Using the MeArm with Arduino』(MeArmのArduino利用ガイド)では、スケッチ付きで手順がわかりやすく説明されており、組み立ての際に役に立つだろう。
『MeArm Robot Assembly Guide』(MeArmロボット組み立てガイド)は、透視図入りでよりわかりやすく説明している。
ジョイスティックコントローラを組み立てよう
ジョイスティックコントローラ基板は、メインのArduinoコントローラボードから取り外す。まず、ジョイスティックコントローラ基板は、6mmねじ4本を使って、コントローラ形状のアクリルプレートに取り付ける(このとき、きちんとプレートのねじ穴に通すこと)。次に、図のように、束ねられた10コアリボンケーブルを使って、Arduinoコントローラボードに基板を接続する。

サーボモータキャリブレーション
サーボモータの特定の位置に印を付けておくと、コントローラボードからキャリブレーションしやすくなる(キャリブレーションとは最初の位置に基準を戻すことだ)。また、アームが固定パーツと干渉しないように、小さいパーツの組み立ての際に正常に動作するかテストしておくことも重要だ。今は組み立ての仕上げに進む前なので、アクチュエータの位置を簡単に調整できる。
| コントローラの接続 | モータの位置 | 操作 |
| M | 中央 | アームの回転 |
| L | 左 | 上 / 下 |
| R | 右 | 前進 / 後退 |
| C | グロー / グリッパー | 開 / 閉 |
注: サーボワイヤは、キット内のコントローラの印に合わせて色分けされている。接続方法については、必要に応じて下記のデータを参考にして欲しい。
| サーボワイヤ | サーボ配線の色 | ボード上の印 |
| PWM Signal | オレンジ | 黄 |
| +6V | 赤 | 赤 |
| GND | ブラウン | 黒 |
コントローラボードに接続してから電源を入れ、モータをキャリブレーションする。モータが各位置まで動くので、サーボと連動するシャフト上に線の印を付けることができる。それぞれのサーボアクチュエータとアームは、手順に示す方向に配置が可能だ。
ベースの組み立て
サーボカラー3 (M)をカットアウトシートから切り離し、ワイヤをサーボカラーの穴に通してサーボカラーをサーボモータにはめ込む。次に、8mmねじ2本を使って、ピボットサーボプレート2をサーボモータに取り付ける(『Guide to Using the MeArm with Arduino』のスケッチを参考にして欲しい)。
20mmねじ4本をアームベース1の下側から押し込み、各ねじにナットを取り付け、途中の位置まで下に回す。そして、サーボを下にしてサーボプレート2のねじ穴と各ねじの位置を合わせて取り付ける。ねじを締めてサーボプレートを固定し、ナットをアームベースの位置まで下に回してしっかり固定すること。
サーボモータ(L)の組み立て
サーボカラー5をカットアウトシートから切り離し、サーボコネクタとスラックワイヤをサーボカラーの長方形の穴に通して、アームサーボ(L)をサーボカラーにはめ込む。次に、8mmねじ2本を使って、アームサーボプレート4 (L)に固定する。

サーボモータの袋からセルフタッピングねじを2本取り出し、黒色のツインサーボアクチュエータを長いサーボアーム6にねじで取り付ける。このとき、ねじは適度に締め、強く締めすぎないことに注意する。次に、組み立てたサーボアームの位置が9時の方向になるように、サーボモータ(L)に取り付ける。サーボコントローラジョイスティックを使って、正常に動作するかテストし、ベースなど他の部品と干渉しないか確認する。テストしたら、袋から小ねじを取り出し、小型のプラスドライバで締めて左のサーボモータの完成だ。
サーボ(R)の組み立て
サーボ(L)と同じように、カラー5、8mmねじ2本、アームサーボプレート12 (R)を使って、サーボ(R)を取り付け、黒色のツインサーボアクチュエータをアームベースジョイント13 (R)に取り付ける。次に、組み立てたサーボアームの位置が約12時の方向になるように、サーボモータ(R)に取り付け、小ねじを使って固定する。コントローラを使って動作をチェックしたら、6mmねじを使って、パラレルリンケージ17をアームサーボプレート12 (R)の上部に取り付け、リンケージが自由に動けるように固定する。
ピッグの組み立て
ピッグを組み立てるには、アームマウント8 (L)を使って、アームベースジョイント10 (L)と短いアーム9を10mmねじで取り付ける。このとき、それぞれの部品が自由に動けるように確認すること。
アームボトムプレート14の組み立て
サーボの袋からセルフタッピングねじを2本取り出し、黒色のサーボダブルアクチュエータをアームボトムプレートにねじで取り付ける。
ここまで組み立てた5つのパーツは、下に示す図のようになる。
左上から時計回りに、固定具、ねじサイズガイド、そして組み立てたサーボモータ(L)、ピッグ、アームボトムプレート(ここで取り付けられているサーボモータは、クローサーボを使って固定具合をテストしているが、このボトムプレートは、ピボットプレートにすでに取り付けられている間のサーボに最終的に取り付けられる)、サーボモータ(R)、ベースだ。
 アームボトムの組み立て
アームボトムの組み立て
次に、組み立てたサーボモータ(L)に、フロントアームのクロスメンバー、組み立てたピッグ、アームボトムプレート、リアアームベースのクロスメンバーを取り付けていく。
最初に、12mmねじとナットを使って、フロントアームのクロスメンバーをアームサーボプレート4 (L)に取り付ける。ここでは、クロスメンバーのオフセットカットアウトをサーボプレート(L)に完全にはめ込まないように注意して欲しい。ねじとナットを完全に締めず、遊びを設けておくことで、組み立てたボトムの位置合わせが簡単になるからだ。ねじとナットは、最終的にユニット全体を完成させる段階で締める。
次に、組み立てたピッグ8とスロットの位置を慎重に合わせ、12mmねじをサーボアーム6とパラレルリンク17に通し、スペーサ20を追加して、短いアーム9 (組み立てたピッグに取り付け済み)にねじ込む。サーボアームがサーボモータ側に若干ずれてしまっていたので、後でワッシャ2個を使ってスペーサを交換した。これにより、元の位置から約半分上手にずらし、アームとモータが正常に連動するようになった。
アームボトムプレート14をアームサーボプレート(L)に斜めに挿入し、てこを動かすようにピグのセレクタのタブに取り付ける。先ほど使った12mmねじは完全に締めていないので、位置を合わせやすいはずだ。
これで、バックアームベースのクロスメンバー11を使って組み立てたピッグをロックし、12mmねじとナットで固定することができる。
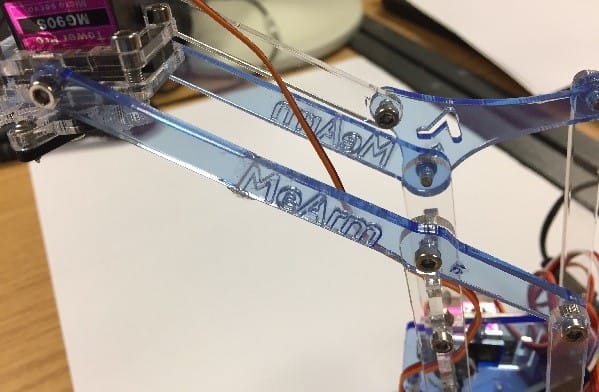
次に、左右のパーツを取り付けていく。最初に、12mmねじとナットでメインアームのクロスウェブ15をアームベースジョイント10 (L)に取り付け、このクロスウェブをアームベースジョイント13 (R)に12mmねじとナットで取り付ける。これで、アームが連動するようになった。
次に、組み立てたアームサーボプレート12 (R)と、アームボトムプレート14、フロントアームベースのクロスメンバー7、バックアームベースのクロスメンバー11の位置を慎重に調整しながら、それぞれを取り付けていく。先と同じように、すでに取り付けていた12mmねじは完全に締めていないので、位置合わせもしやすいはずだ。最後に、12mmねじ2本とナット2個を使って、このサーボプレート(R)を固定し、すべてのねじとナットを締めたら、下側の組み立ては完成だ。また、固定する際は、ナットをクロスメンバーのスロットにはめ込み、親指と人差し指でナットを押さえながら、もう一方の手で12mmねじを挿入し、ナットの穴と位置を合わせてからつまんで回すと、うまく作業することができる。


これで、組み立てた下側はベースの中間のサーボモータに取り付けることが可能になった。
コントローラボードに接続して電源を入れ、サーボをキャリブレーションしておこう。このとき、約12時の方向になるように位置を合わせ、MeArmベースの文字が上下逆にならないようにすることに注意することだ。モータに付属の小ねじと小型のプラスドライバを使ってサーボに取り付けたら、コントローラの電源を入れ、ジョイスティックを使って正常に動作するかチェックする。この段階では、わずかに調整するだけなので簡単だ。
次に、6mmねじを使って、組み立てたベースにすでに取り付けているパラレルリンケージ17に長い方のリストジョイント16 (L)の端(中心からずらした穴に近い方)に取り付け、アームベースジョイント10 (L)を、中心からずらした穴の上部に取り付ける。
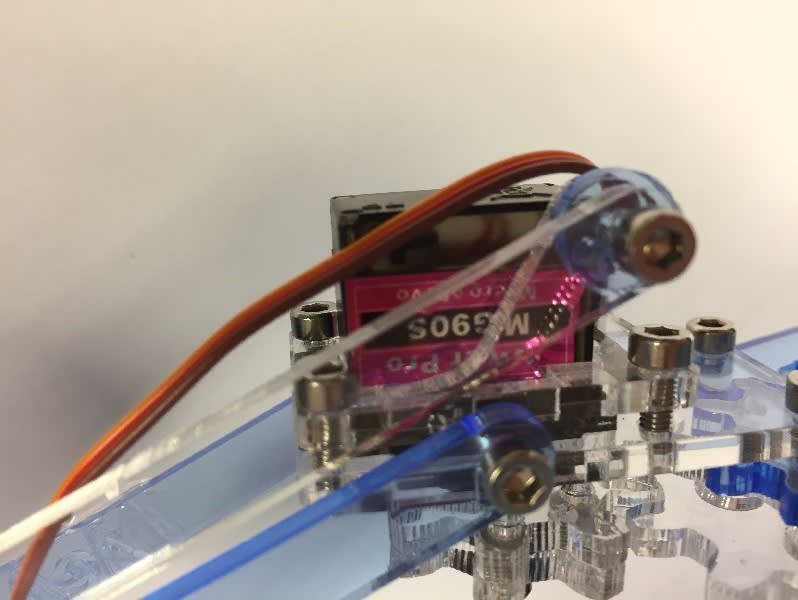
右側では、パラレルリンケージコネクタ19をリストジョイント(R)に10mmねじで固定する。次に、10mmねじとスペーサ20使って、サーボプレート(R)に取り付けたパラレルリンケージ17に取り付ける。また、その次に、6mmねじを使って、新しいパラレルリンケージコネクタ17をパラレルリンケージコネクタ19に取り付けていく。

組み合わせたパラレルリンケージコネクタの画像
グリッパークローユニットの組み立て
まず、クランプトップサーボカラー21をサーボモータにスライドさせてはめ込む。
リストアタッチメント23 (R)とリストアタッチメント22 (L)をサーボの側面に慎重に合わせ、リストアタッチメントとサーボをクランプボトムサーボマウント24に取り付ける。
次に、8mmねじ4本を使って、各パーツをクランプボトムサーボマウントに固定する。
8mmネジを使って、グリッパー28 (L)をグリッパープレート25に取り付ける。12mmねじも挿入して、このユニットを仮止めしておくが、このねじはまだ締めないでおく。
サーボ固定具の袋から取り出したセルフタッピングねじ1本を使って、シングルサーボアクチュエータアームをトップサーボギア30の長いスロットに取り付ける。
キャリブレーションしたクローサーボに取り付ける。グリッパーを12時の位置にして、サーボアームが6時の方向を指すようにしておく(組み立てたら、コントローラを使ってグリッパーの動作を簡単にテストできるので、グリッパーが最適に動作できるように位置を調整しておこう)。
6mmねじを使って、ボトムサーボギア29を接続する。
次に、8mmねじを使って、グリッパーギア26を底面から取り付け、先ほど挿入し、仮止めしていた12mmねじも締める。
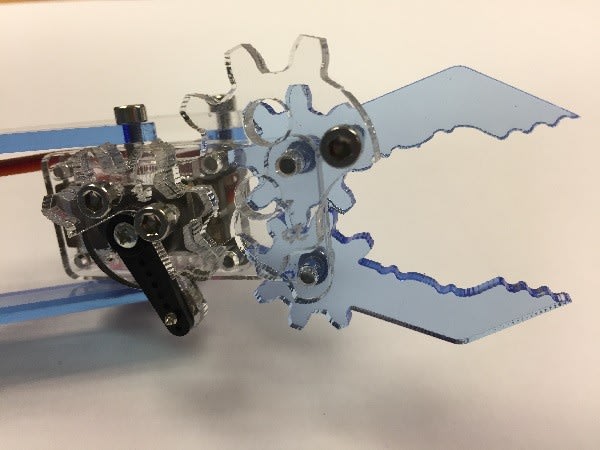
キャリブレーションしたサーボギアと、上手くかみ合うように、顎の部分が90度開くようにセットしておこう。
ユニットのねじを締める前に、コントローラを使って動作をテストすることをお勧めする。私は動作をテストし、さらにサーボが最適に動くように、位置を調整した。
次に、組み立てたグリッピングをアームユニットに取り付けていく。
最初に、8mmネジを使って、グリッパーをリストジョイント31 (R)に取り付け、リストアタッチメントに23 (R)にはめ込む(組み立てガイドの図に正確な位置が記載してある)。
次に、8mmねじを使って、パラレルリンケージ17をリストアタッチメント23 (R)のアッパージョイントに取り付ける。そしてスペーサ20を挿入してアームの位置を正確に合わせておく。
最後に、8mmねじを使って、リストジョイント16 (L)をリストアタッチメント22 (L)に取りつける。
サーボクローケーブルは、メインクロスウェブ15のカットアウトを通し、Arduinoコントローラボードに届くように、付属の拡張ケーブルを取り付け、正しく接続されていることを確認する。
次に、取り付け穴4つとスペーサナットを使って、Arduinoコントローラボードをベースプレート1に取り付ける。
最後に、サーボケーブルをすべてArduinoコントローラボードに取り付けると完成だ。
これで、動かす準備はできた。
電源を入れると、キャリブレーションしたポイントまでサーボが移動する。すると、あとはジョイスティックコントローラを使ってアームを自由に動かすことができる。
右側のコントロールでは、上下の動きと、クローを開く/閉じる動作を制御し、左側のコントロールでは、前進と後退、左右の回転を制御することができる。
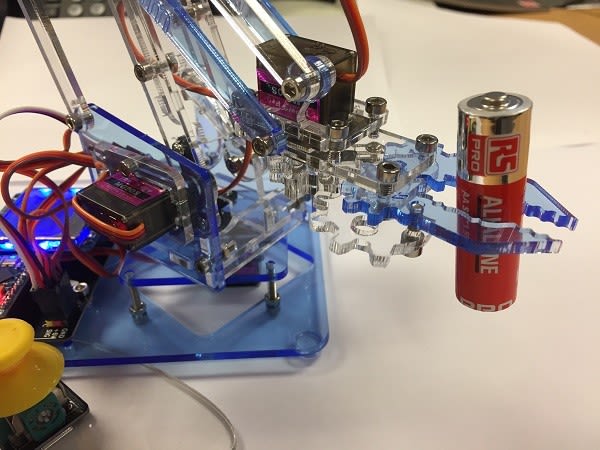
少し練習すれば、さまざまな物体を簡単に持ち上げて動かすことが可能だ。ジョイスティックを使いこなせば、すばやい動きや複雑な動作も出来るようになるはずだ。
このNeArmはコンパクトなアームから素晴らしいパフォーマンスを発揮することができる。コントローラをプログラムすることによって、より細かい動きをさせることもでき、カスタム設計やプロジェクトと統合することもできるぞ。