気象予報士のクマさん!?ブリーズベターベアー Part2組み立て
この記事を購読
 Dave from DesignSpark
Dave from DesignSpark
こちらの記事について、内容・翻訳・視点・長さなど、皆様のご意見をお送りください。今後の記事製作の参考にしたいと思います。
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
こちらの記事の感想をお聞かせください。
ブリーズベターベア ビルドガイド
前回(Part1)で模索したアイデアやプロトタイピングを元に、ブリーズベターベア(Breathe Better Bear)最終完成版をいよいよ構築していきます!!なお、使用する材料については前回の記事をご覧ください。
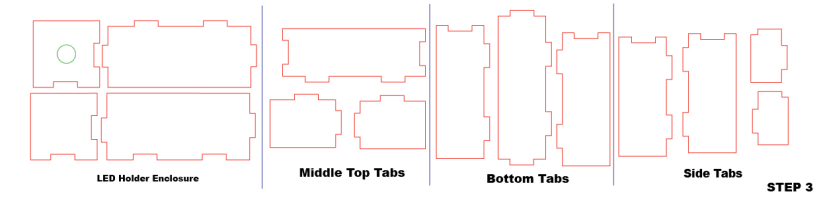
このガイドではレーザーカットファイルとプロジェクトの組み立て方法を説明していきます。レーザーカットファイルは28×48cm、厚さ3mm(12" ×20"、厚さ⅛")の木材シートを想定した設計となっています。私の場合、バルトバーチ合板を使いましたが他の物でも代用できます。
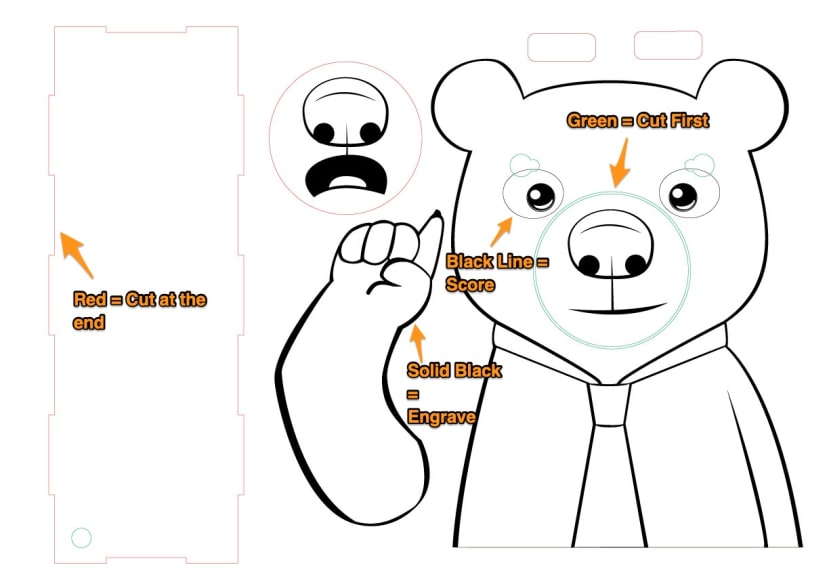
SVGファイルではレーザーカッターに簡単にインポートできるようにステップを写真のように色分けしました。緑は最初にカットするところで他のパーツの内側に穴を開けるものです。赤はカットしてより大きなパーツに使用することを意味し、黒の実線は彫刻用、黒の線(薄い線)はスコアリング用です。
この記事には3Dプリント用のファイルも添付されていますので記事で紹介している顔以外のカスタムピースを3Dプリントできます(添付ファイルは記事の一番下にあります)。
また、これらのファイルの部品は一般的なマイクロサーボに付属しているサーボホーンなどにも互換性を持たせて設計されています。
ステップ1:サイドパネルとバックパネル
関連ファイル(参照添付ファイル):bear_BottomTopTabs.svg、bear_backpanel.svg、bear_sides.svg
添付ファイルの部品をレーザーカットし終えたら、このステップで側面上部及び底部のパネルを接着していきます。
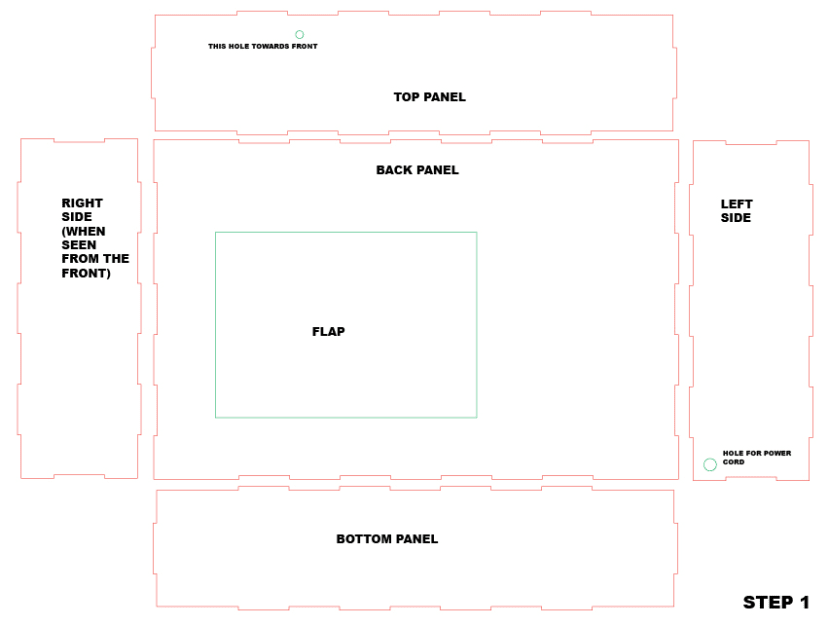
バックパネルには開口部があり、そこに蝶番が必要になりますのでご注意ください。蝶番用の穴はレーザーカットされたファイルにはありませんが(私が使った蝶番が標準サイズではなかったので意図的にいれませんでした)、レーザーカットされた穴がなくても蝶番を簡単に追加することができます。接着については部品を接着する前に穴を開ける方が簡単です(写真では穴を開ける前に接着してしまっていますが、説明したように接着する前に穴を開けておいた方がとてもスムーズにいきます)。
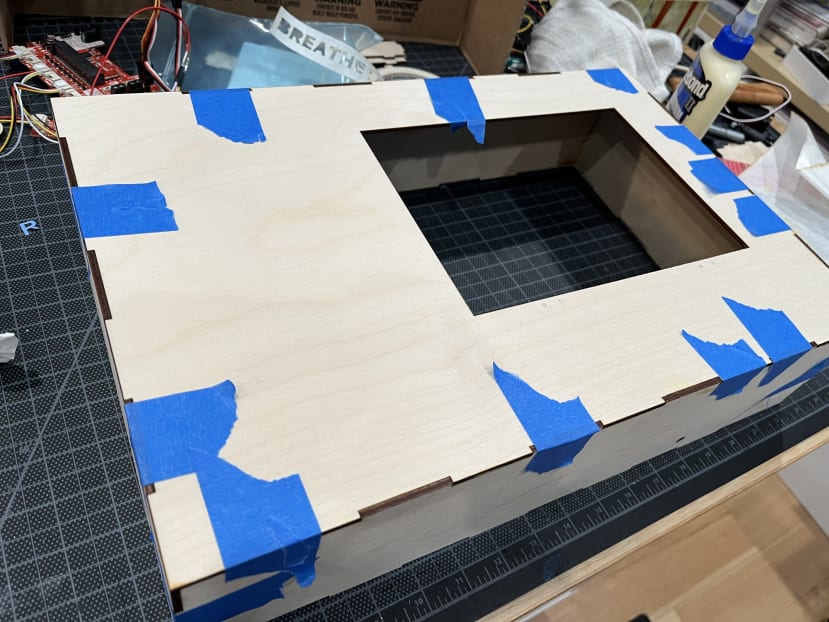
接着後、接着剤が乾くまでピース同士をしっかり固定しておきましょう。写真ではマスキングテープを貼り付けて固定しました。
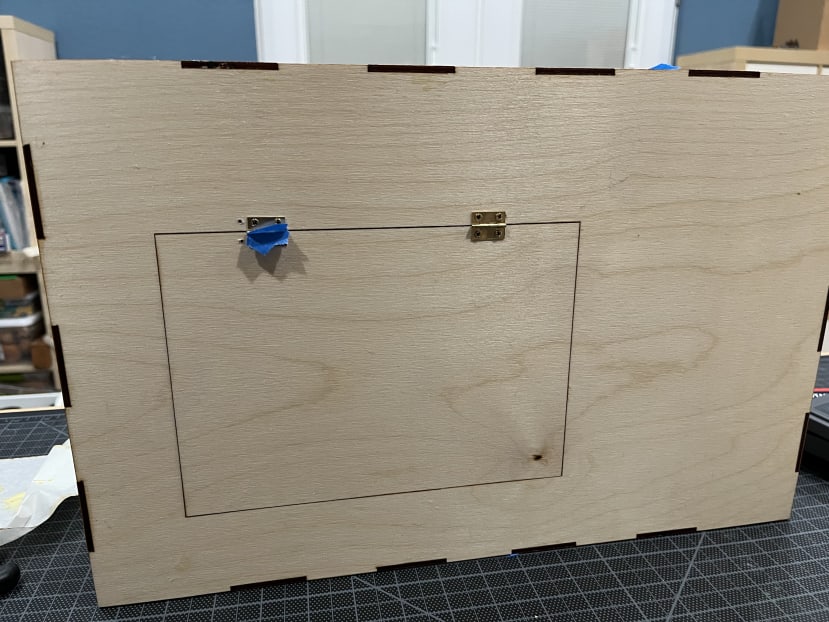
接着剤が十分乾いたら蝶番でフラップを取り付けられます。フラップが箱の中に入り込まないように、内側に余った木片を使ってストッパーを付けました。また、フラップを引きやすくするために取っ手を付けることもできます(写真には写っていません)。
ステップ2:クマとエアークオリティーラベルの塗装
関連ファイル(参照添付ファイル):bear_BearLabels.svg
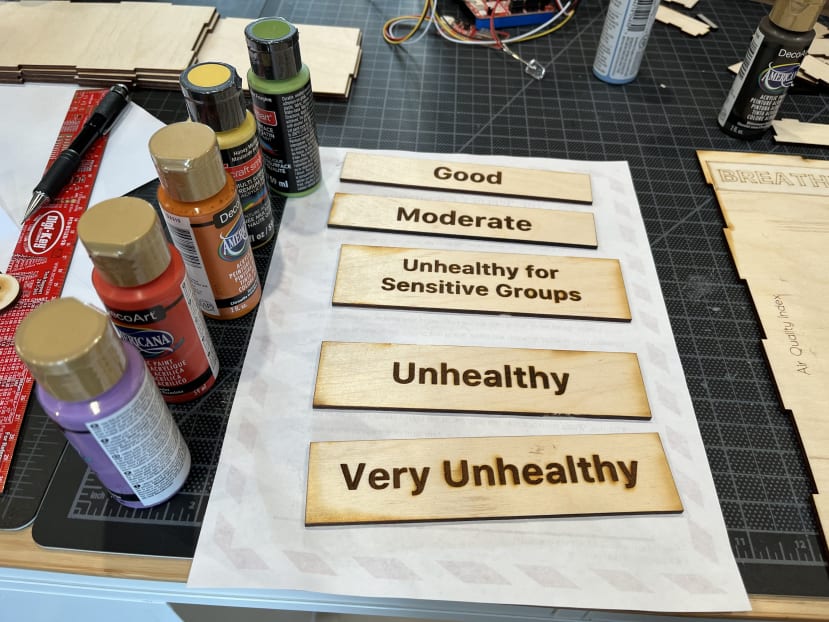
クマとラベルのレーザーカットは、彫刻が必要なため非常に時間がかかります。彫刻の代わりにスコアリングをしてから塗料で文字やクマのラインを塗るという方法もあります。これについては好きな方で問題ありません。
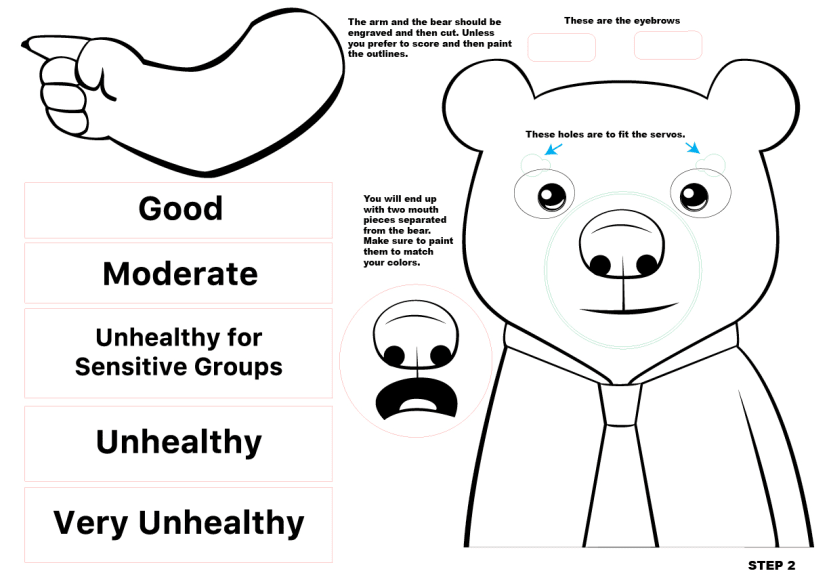
大気質ラベルのカラーパレットは自由で良いですが、公式のAQIは緑、黄、橙、赤、紫、マルーン(暗い赤)の順になっています。
私の場合、他のラベルのように最後のマルーン(暗い赤)レベルは作らず、代わりに右側のビックリマークを使用しました(後述)。
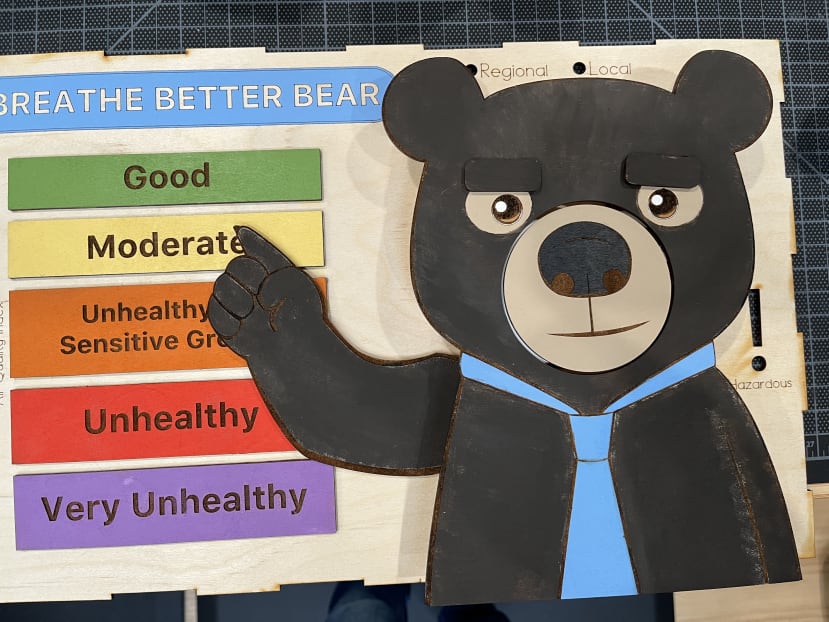
その後ダークチョコレートブラウンの絵の具を使ってアメリカグマに塗っていきました。
クマに塗る塗料で様々な効果を試しました、例えば下の写真では塗装にムラが出てしまっていますが最終的にはエッジを明るくかつ均一に塗装することで輪郭をはっきりとさせました。下の写真は試しに、AQI表に載せてデザインを確認しただけで接着はまだしてません。
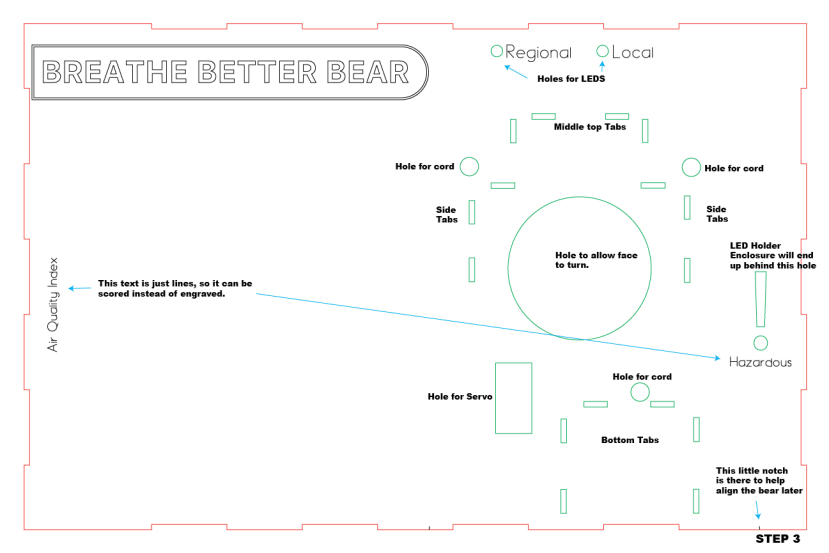
ステップ3:フロントパネル
関連ファイル(参照添付ファイル):bear_frontpanel.svg、bear_BottomTopTabs.svg
フロントパネルのセッティングは、まず「Breath Better Bear」ラベルを塗装します。それが乾いたら、乾いたAQIラベルを接着していきます。
接着したラベルが乾いて固定されたらクマを所定位置に固定して電子部品が動作できるように、クマと箱の間のスペーサーの役割をするタブを接着します。必ず接着剤を塗る前に、まずピースをはめ込んでください!私がデザインしたパーツは一方向にしか入らないようになっているので、もしうまくはまらない場合は別のパーツを使うか、向きを変えてみてください。多少のクリアランスは持たせていますが、無理矢理入れると壊れるので注意してください。正しい配置がわかったら接着剤を塗ります。
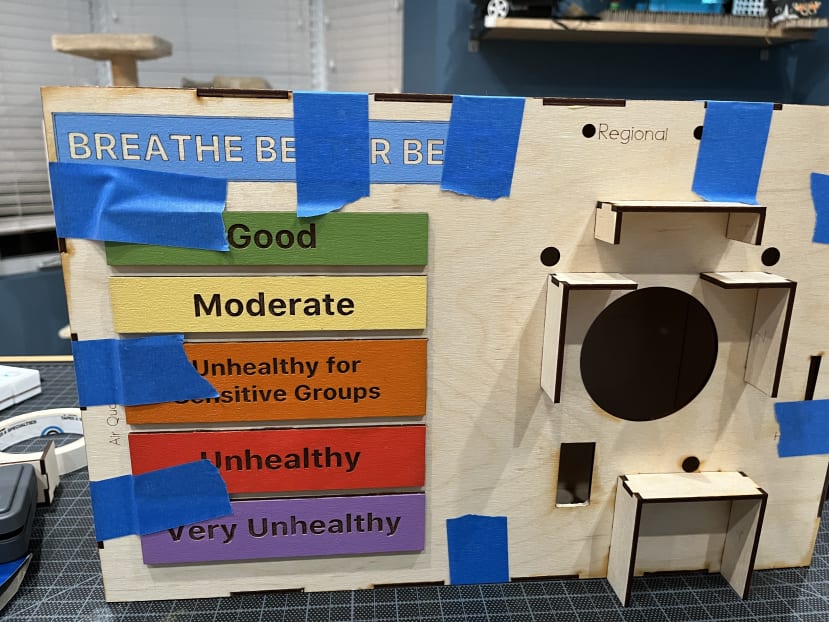
タブが完全に乾くまでの間、先ほどのバックパネルとサイドパネルで作った箱にフロントパネルをはめ込みます。パネルは接着剤で所定位置に固定して乾かします。
下の写真では横向きに置いてありますが、これは単にテープを剥がす前の状態を示すためです。実際には水平において(面を上に向けて)乾かしています。
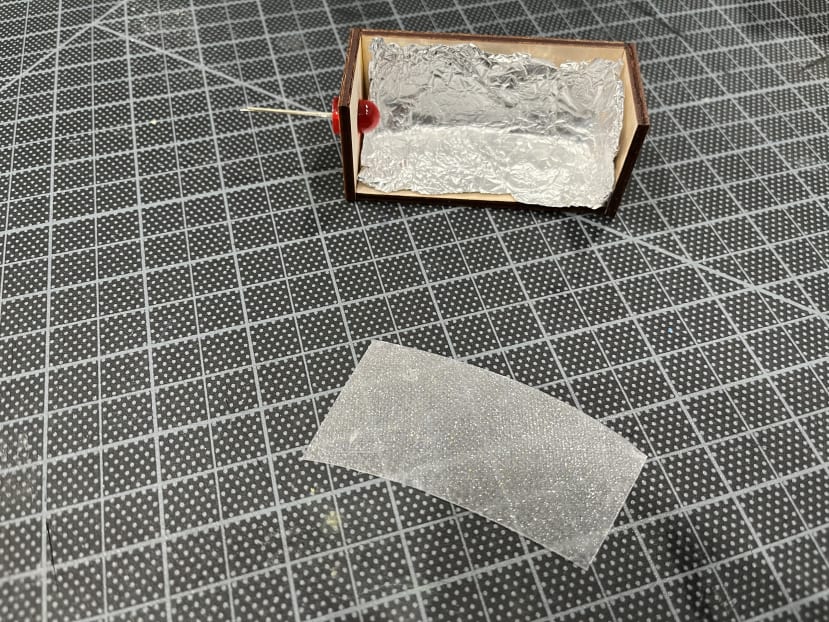
箱を乾かしている間にLEDホルダーの筐体を組み立てます。このパーツはボックスの中でビックリマークの後ろにある箱で使用する予定です。LEDの反射を最大限にするためにアルミホイルを接着し、ビックリマークのすぐ後ろに穴を塞ぐ用として半透明のアクリルの素敵なキラキラした部分を見つけたので、これを接着しました。これはマークを覆い、少し余るくらいの大きさであれば接着できます。私は赤の10mmLEDを使いましたが、これはパーツの穴にうまくフィットしました。
ステップ4:クマの口
関連ファイル(添付ファイル参照):bear_BearLabels.svg、Bear Face Parts.stl
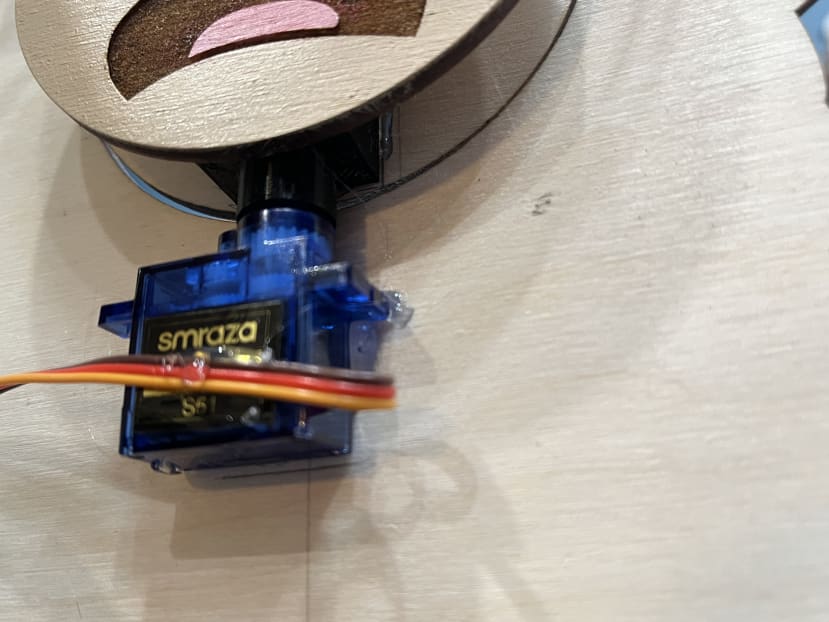
このステップでは私が作成したカスタムピースを3Dプリントします。また、サーボホーンの一つをカットして真ん中の部分だけが残るようにします(アームをカット)。この小さなパーツは3Dプリントしたパーツの内側に空いた穴に取り付けて接着します。少しはめるのがきついかもしれませんので必要に応じてハンマーなどでたたいて取り付けてください。前回述べたように、ホーンの真ん中のパーツを3Dプリントできなかったために既存のものを再利用しています(下写真)。
サーボホーンをカットしたパーツと、先端にロッドを付けたパーツを組み合わせることでクマの口の長さになります。それらを片方のパーツの裏側に一番細いパーツが円の外に突き出るように接着します。この時、顔の一番下の部分がサーボホーンが付いてるパーツに向くように顔の真ん中に合わせます。
最初のピースを正しく位置合わせして接着したら、反対側の2つめのピースも同じ方向に向いていることを確認して接着します。この際にも顔の真ん中に配置します。
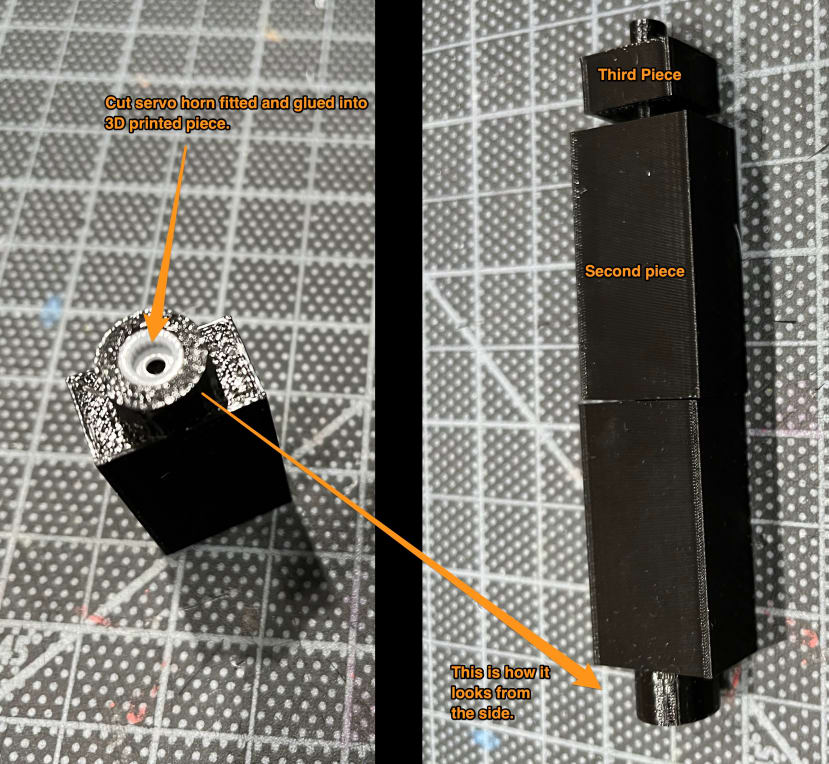
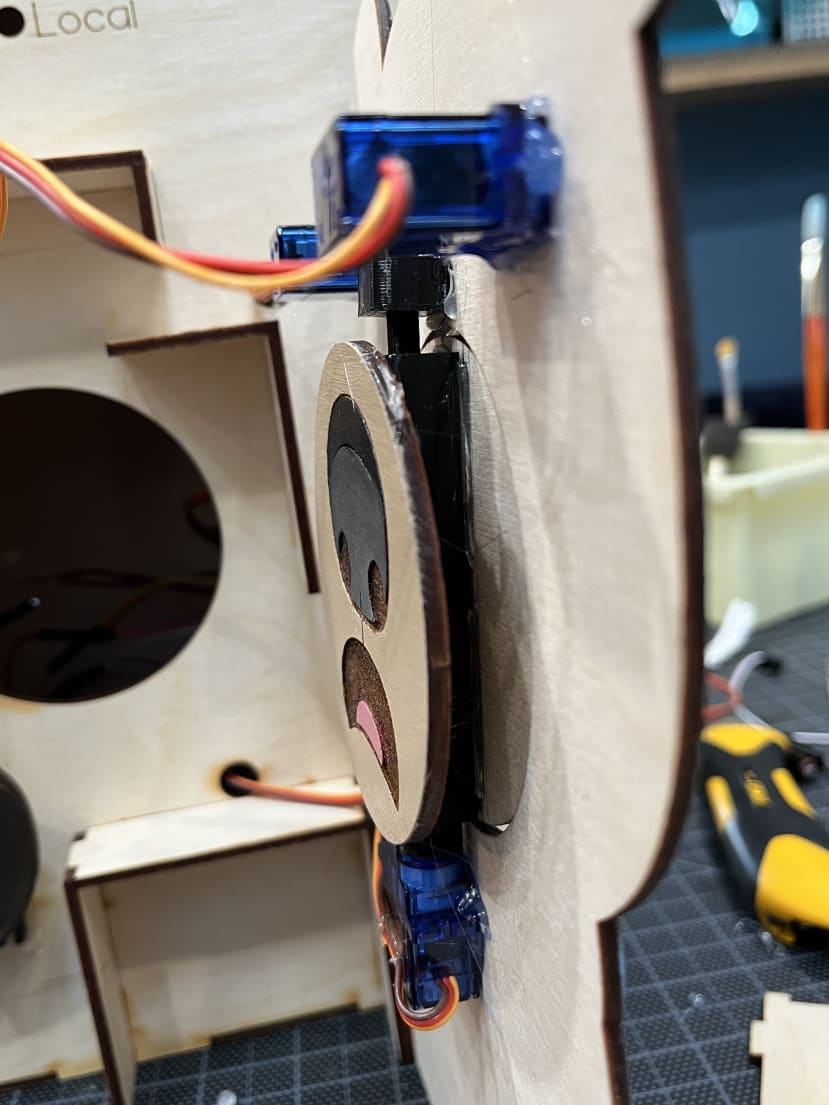
下の写真は今説明したパーツをクマに取り付けているところです。この取り付け方法については次のステップ(ステップ5)で行います。この写真はどのように配置して接着するかをイメージしてもらうためのものです。
ステップ5:組み立て
この段階で接着された箱、タブとラベルを接着したフロントパネル、色塗りしたクマ、クマの腕、LED筐体、カスタムピースに接着した口が完成しているはずです。
では、ビックリマークの穴のすぐ後ろに半透明アクリル板を接着します。その後、箱の中にあるビックリマークの後ろにLED筐体を接着します。
それが接着し固定が完全なものになったら、いよいよサーボを取り付けます。サーボは全部で4つあり、マイクロサーボが3つ、標準サイズのサーボが1つです。標準サイズのサーボが腕、2つのマイクロサーボは眉毛、そして最後のマイクロサーボが口元を動かします。
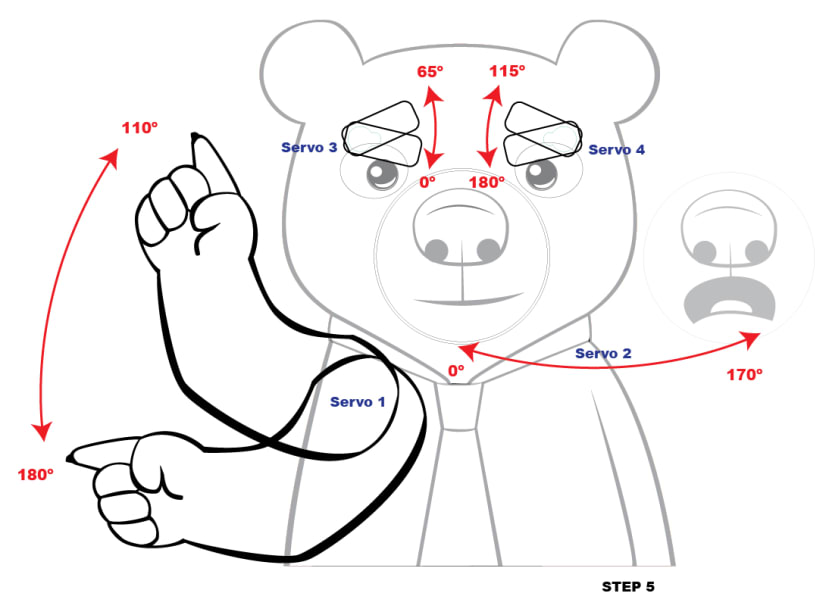
サーボを取り付ける前に、サーボに特定の角度をつけておくとパーツの取り付けや後のコーディングが楽になります。例えば、クマの腕はサーボ1に接続されますのでサーボ1の角度を180度にしておくと、腕の位置が一番低くなるようにした場合の角度が確認できます。この時、他の部品と干渉しないかを確認できます。眉毛のサーボについては(クマを正面に見たとき)左側を0度、右側を180度にセットしておくとサーボホーンを付けて眉毛を接着したときにしかめ面の時の調整ができます。
ただし、接着前にセットするサーボで最も重要なのは口の部分のサーボです。なぜなら一度接着してしまうと、サーボと専用パーツの切り離しが難しくなるためです。0度と180度の両方の極限を設定してみて、それぞれ口に着けた際に両方の表情が正確に示されていれば大丈夫です。もしずれがある場合は、配置位置を調整して口の位置を正確なものにします。
なお、サーボに角度をつける際やその角度を変更する場合はコーディングで行うのが望ましいですが、サーボホーンを用いて調整したい角度に手動で回転することも可能です。
下の図は私が試行錯誤の結果、最終的なパーツの角度がどのようになったかを示したものです。モーターによって個体差があるので皆さんの場合とは異なるかもしれないです。この角度の確認で重要なのは、サーボの始動角度が何度になるかという事と、回る方向です。それが大まかに確認できていれば大丈夫です。
ではサーボを始動角度に設定できたら、いよいよ取り付けです。最初に取り付けるのは腕を動かすための標準的なサーボです。サーボはサーボギアを上に向けて、取り付け穴から押し込みます。穴を貫通しきったらすぐにホットグルーをつけて固定します。次に腕の接続位置を計算できるように、使用するサーボホーンを取り付けます。私は大きなアームが付いたホーンを使用して端にビスを加えられるようにし、グリップ力を高めました。これはクマの腕がホビーサーボには重すぎて、ギアの歯が擦り減らずに腕を上下できるかどうかが心配だったからです。
次にサーボホーンにネジを加えるもしくは接着する前に、腕の取り付け位置を確定しておきます。腕を回転させたときに、一番下のタブに当たらないようにできていれば大丈夫です。下の写真では私が最終的に配置した場所を示しています。見てわかりますが、思っていたよりも腕がタブに近くなっていました。腕が問題なく回転できることが分かったら、ホーンのアームにネジを加えるもしくは接着して固定してください。
次に眉毛用のサーボを取り付けます。このサーボはクマの背面から突き出ていて、上側だけが穴を通るようになっています。この出っ張りは、タブが後でサーボを支持する役割を持っているのでクマを所定位置に固定するまではそのままにしておいてください。
サーボホーン(私は片腕付きのものを選びました)をサーボに取り付け、眉毛の角度が一番低くなる(しかめっ面になる)ようにします。そして、ギアの中心が眉毛の端に来るようにして接着します。
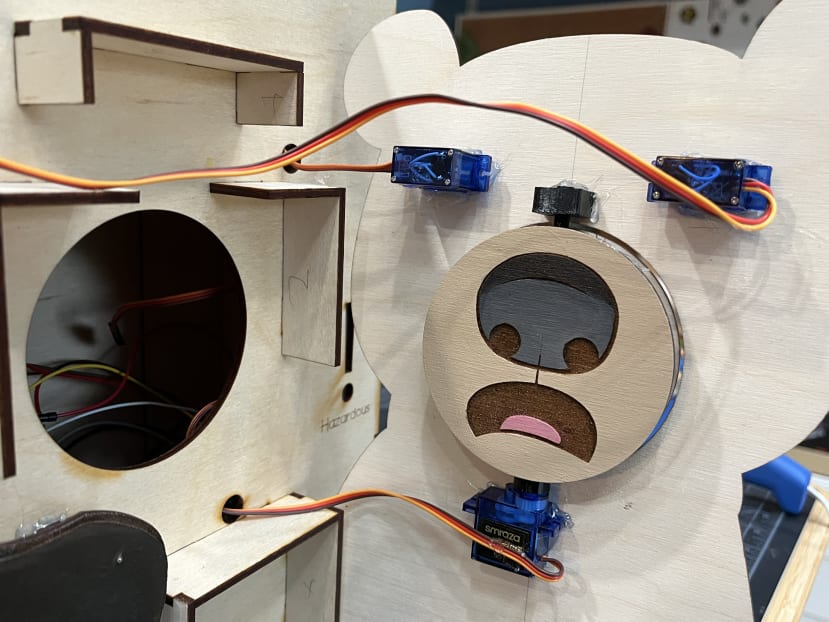
口についてはサーボホーンを内蔵した専用パーツにサーボを接続する必要があり、この時点では2種類の口パーツを挟み込んでいるはずです。口を顔の穴の中心に合わせます。ではまず、サーボと3Dプリントしたピース#3を接着します。3Dプリントされたパーツは中にロッドを入れて自由に回転させたいため、接着剤をつけすぎないように注意してください。
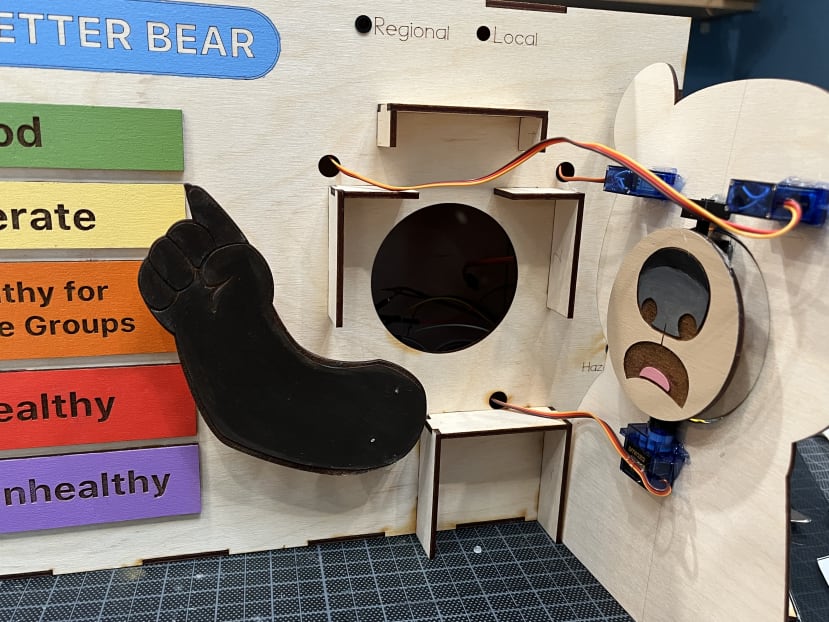
すべてのサーボをクマに接着できたら、いよいよクマをタブに取り付けます。まずサーボの配線がすべて穴の中を通ることを確認します。確認できたらタブの上部に接着剤を付けて、その上に電子部品を搭載したクマを所定位置に置きます。箱の前面右下に小さな切り欠きがあるのでそれを頼りにクマを置いてください。

ステップ6:電子部品(エレクトロニクス)を接続する
箱に接続したクマの接着剤が完全に固まったら、いよいよ電子部品を追加します!
箱の上部にはトグルスイッチ用の穴があります。さらにLEDの前面には、地域設定と局所設定用のLEDの穴が2つあります。ここではプラスチック製のLEDマウントを使用しましたが、LED自体を接着剤で固定することもできます(ホットグルーを使用する場合は、極度な熱でLEDを壊さないように注意してください)。
接続配線図は下図をご覧ください。今回私はReka:Bitボードを使用しました:
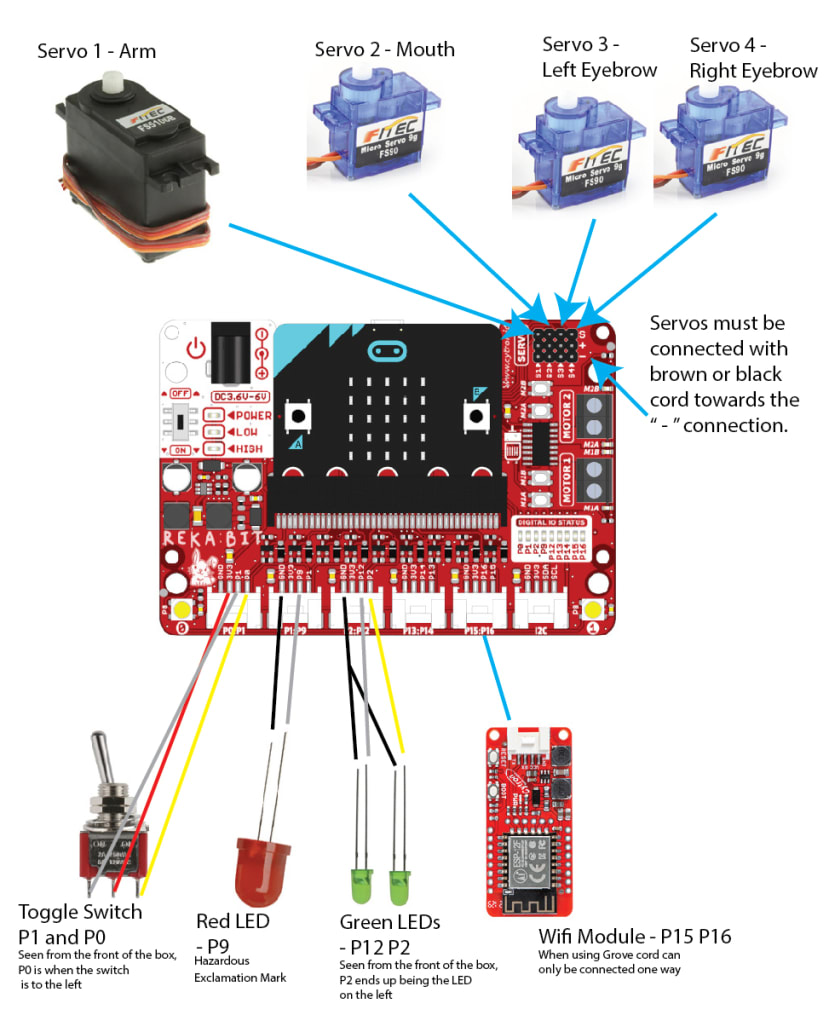
トグルスイッチとLEDの接続にはGrove 4ピン-メスケーブルを使用しました。このケーブルは今回のプロジェクトで余ったものです。はんだ付けはできるだけ最小限にして、その代わりにジャンパーケーブルを使用しましたが緑のLEDについてはグラウンドを共有しなければならないので、継ぎ合わせるのが面倒でした。
すべての電子部品が箱の中にすっぽりと収まり、DesignSpark Sensor Development Kitも取り付けられました。
次へ
Part 3ではIoT接続によるプロジェクトのコーディングについてお話ししようと思います。