【转载】智能导盲杖
关注文章 戴夫来自 DesignSpark
戴夫来自 DesignSpark
你觉得这篇文章怎么样? 帮助我们为您提供更好的内容。
戴夫来自 DesignSpark
Thank you! Your feedback has been received.
戴夫来自 DesignSpark
There was a problem submitting your feedback, please try again later.
戴夫来自 DesignSpark
你觉得这篇文章怎么样?
原作者:hnyzcj
转载自:http://mc.dfrobot.com.cn/thread-24029-1-1.html
智能导盲杖
作者:陈诺、陈杰、李晓坤 单位:淮南一中
视频:http://www.tudou.com/programs/view/yn-tDiGLhx4/
创意来源:
导盲杖是盲人这个群体使用最为普遍的一种工具,然而传统的导盲杖仅仅是一根拐棍。而随着我国城镇化进度快速发展,城市道路环境日趋复杂。传统导盲杖已经远远不能满足盲人的出行需求,盲人迫切需要一种智能导盲杖。因此有了我们下面智能导盲杖的创意设计。

作品设计:
A非接触障碍物的检测: 盲人使用传统导盲杖时,通过感触脚边的障碍物及盲道进行判断,可以避开脚边障碍,但经常会撞上脸部高度处的招牌等物体。但在实际道路行走时,却极有可能遇到复杂环境,传统导盲杖没有触碰到障碍物无法感知的障碍物。
B三维立体检测:本作品设置了左中右三个传感器,左右为红外检测开关,中间为超声避障模块。中间传感器通过声音提示盲人,而左右传感器检测左右方向上的障碍物,通过手柄上的振动装置提醒盲人。三个传感器形成一个传感器集群,在一定方向和角度上避免了导盲的盲区。
C转向提示:盲人在行走过程中间,需要转向,可以通过按下左右转向按钮,点亮导盲杖上的转向灯,给路人转向提示。
D自动调平:智能导盲杖的三维立体检测头,带有自动调平功能,不同盲人因为使用习惯的不同,导盲杖与地面形成的夹角也不同,但检测头始终能够与地面保持水平。
E一键找寻:本智能导盲杖配有一个智能找寻钥匙扣,当导盲杖放置于一个位置时,盲人可以通过按下找寻键,快速找到导盲杖。
项目器材:
|
序号 |
名称 |
数量 |
|
1 |
Arduino Uno |
1 |
|
2 |
IO 传感器扩展板 V7.1 |
1 |
|
3 |
SEN0207 防水超声波测距模块 |
1 |
|
4 |
SEN0019 3-80cm红外数字避障传感器 |
2 |
|
5 |
led |
2 |
|
6 |
微型振动模块 |
2 |
|
7 |
数字大按钮模块 |
2 |
|
8 |
拨码开关 |
1 |
|
9 |
7.4V电池 |
1 |
|
10 |
Bluno Beetle |
2 |
|
11 |
3.7V电池 |
2 |
制作过程:
a电路连接:
拐杖部分使用Arduino Uno作为主控器,使用超声测距和2个红外数字避障传感器作为避障监测端,2个震动模块传达左右向障碍物信息,2个按钮配合两个LED让盲人给行人转向提示信息。具体电路连接如下。

b代码编写:
建模安装:
导盲杖的主体选用了一个伸缩拖把杆,分为传感器部分、主控器部分、输入和感知三部分。拐杖主体结合在一起设计模型如下。
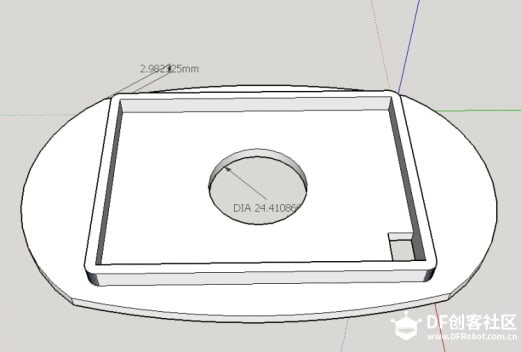
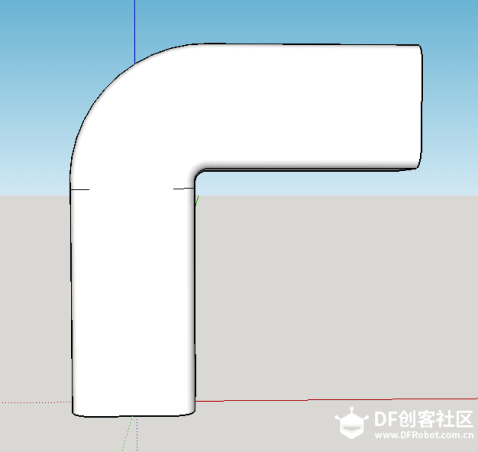
连接件
由于拆装的是一个拖把杆,我们的主控器要安放到拖把顶上,所以设计连接件用于连接拖把与主控盒部分。

连接模型

连接件打印实物

连接件安装在拖把杆头部
如果在安装过程中感觉拖把头部很难进入连接件时,可以使用热水将连接件烫一下后,再安装。
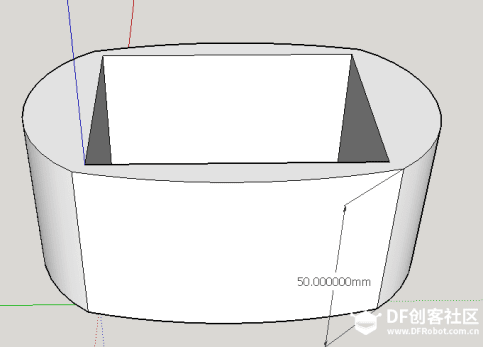
主控器仓模型
主控仓盖模型


上面两个图显示了用四根螺丝将连接件与主控仓固定
安装好主控仓后,在主控仓位上适当位置上钻孔,最初想法是连接线从拖把杆内部走线,但手头没有合适工具能够在金属表面打孔的所以临时改为走明线。将主控器及相关传感器电子部件放入主控仓内并将连接线从孔中穿出。
将红外避障开关从孔中穿线
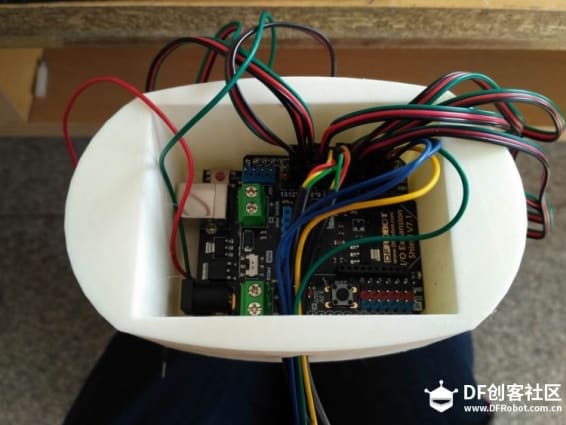
主控器放置仓内并固定

钻孔并正确安装LED指示灯

将输入感知部件相关传感器从仓盖孔中穿过
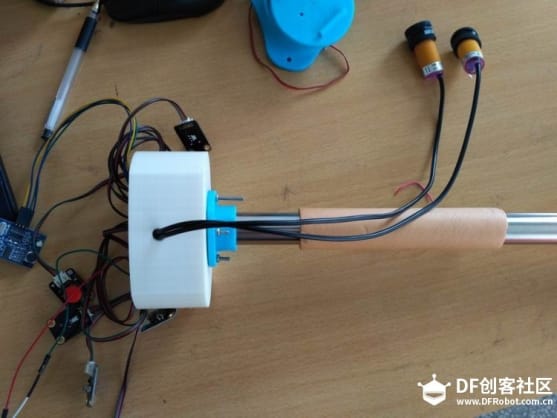
传感器部分采用了一个防水超声波和两个红外开关,形成一个多角度的检测集群。为了让传感器和拖把杆融合起来。我们设计了固定卡子和传感器仓。

固定卡子

传感器仓

传感器仓盖

将传感器安装到适当位置上,中路为超声波传感器,左右为红外避障开关。

安装好后,用热熔胶从仓内部对传感器进行固定

把手
把手部分安装输入感知器件:转向按钮,左右振动提示器,以及蜂鸣器。
把手3D模型

3D打印把手
用电钻在手柄上钻孔,分别安装以上电子件

安装后整体效果

图23测试转向功能
一键找寻功能使用了两块Bluno Beetle控制器,通过无线蓝牙通讯实现主从之间通信。蓝牙模块主从设置请参考制作蓝牙控制开关。
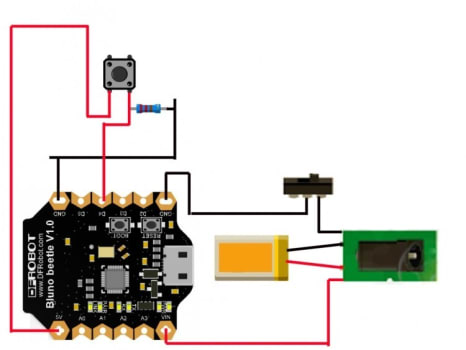
蓝牙主控端电路连接(钥匙扣端)

蓝牙主控端图

蓝牙被控端电路连接

图27被控端3D模型设计
为了提高作品的集成度,我们将蓝牙被控端放置于拐杖把手尾部。电路上与智能拐杖相对独立。

注:本文为安徽省教育科学规划课题:基于Arduino平台的普通高中通用技术课程开发项目成果。项目编号:JG14218。
此作品已获2017安徽省青少年科技创新大赛二等奖
(原创作品)