AI SELF DRIVING
Follow article
 Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?

This project is mocking a GPS system on a 2d HSV camera-based technology.
Students will be required to use PID and mathematics to avoid block.
How to do the self-driving? First, get the coordinates of the car. Then find the path from the source to the destination. The mid-point calculation could avoid blocking.
What is PID?

A proportional–integral–derivative controller (PID controller, or three-term controller) is a control loop feedback mechanism .
The P is the direct response to the error that we have sampled.
The I is the period response to the error that we have integrated.
The D is the comparison response to the previous and current response.
The left wheel PID is to reach the right wheel counter numbers, yet the right wheel PID is to get the middle of both wheel counter numbers.
Mathematic

The HSV java program gives the following information about the car location.

The pin diagram of the self-driving car.
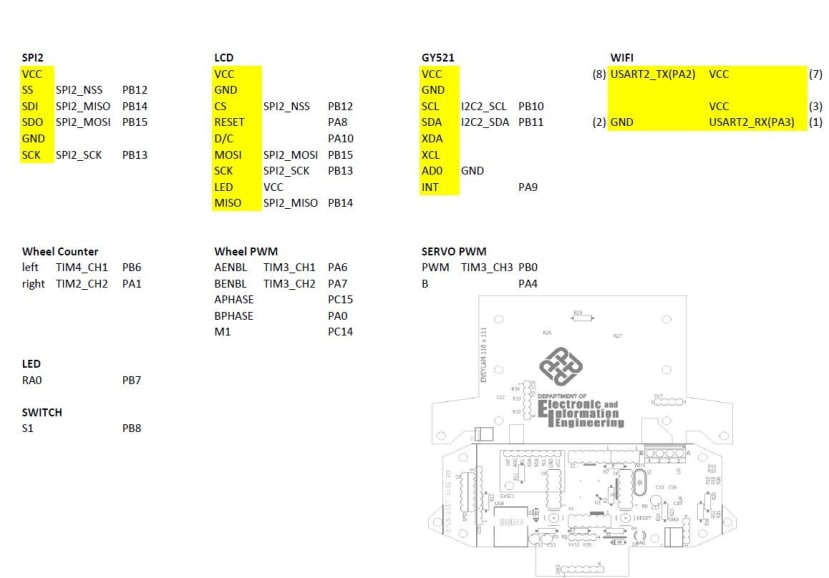
This program for stmf103rbt6, is attached inside the zip file.
ENJOY :)