DIY 天线测量系统第 1 部分:介绍
关注文章
 戴夫来自 DesignSpark
戴夫来自 DesignSpark
你觉得这篇文章怎么样? 帮助我们为您提供更好的内容。
戴夫来自 DesignSpark
Thank you! Your feedback has been received.
戴夫来自 DesignSpark
There was a problem submitting your feedback, please try again later.
戴夫来自 DesignSpark
你觉得这篇文章怎么样?
将 ebm-papst EC 电动机与用于控制的 RevPi Core 和用于信号生成和接收的 LimeSDR Mini 集成在一起,以搭建一个可测量天线性能的系统。
在此处查看由 DesignSpark 预览的全新 K4 驱动系统开发套件系列

天线设计是真正令人着迷的领域之一,几乎像魔术一样。最细微的设计变更可能会产生深远的影响,从来不缺乏创新,而且常常会出现完全反直觉的设计,因此天线仍然属于研发密集型领域。
天线性能建模可以利用软件进行,但是最终,当设计完成后,需要对设计方案进行测量。在本系列帖子中,我们将跟踪一个主要基于增强型机器控制器天线范围 (EMCAR) 开放源代码项目的低成本系统的设计和构建进度。
基础知识
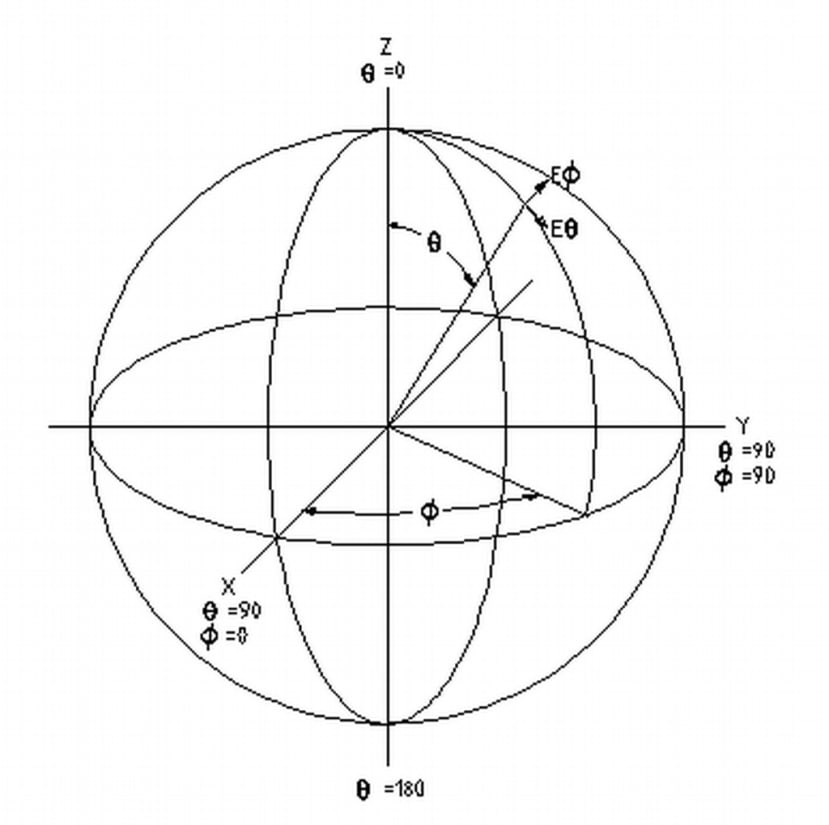
IEEE Std. 149-1979天线测量坐标系(来源:EMCAR 项目)
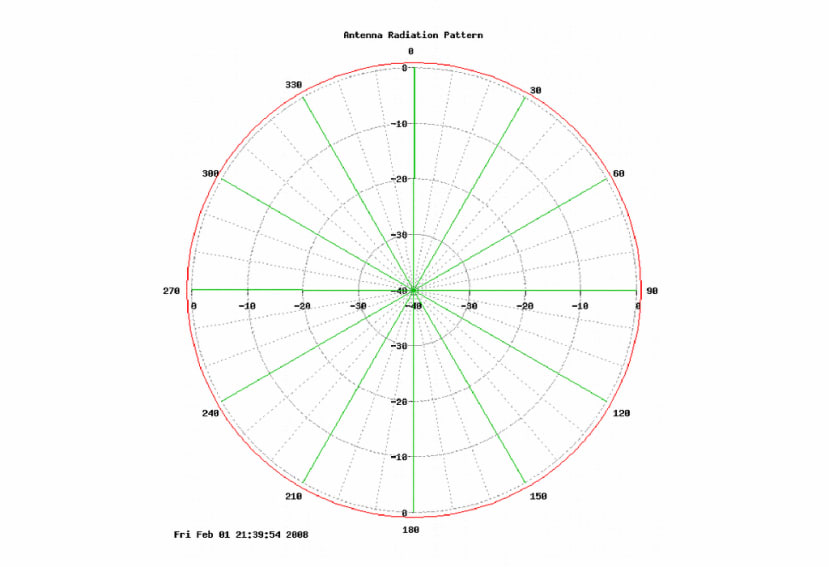
我们对测量天线辐射模式很感兴趣,在本文中,输出使用 2D 极坐标图。未来我们可能会考虑升级设计以生成 3D 坐标图,但是目前 2D 满足需求,可显示正向/反向以及侧向等方向的天线增益。例如,当我们需要全向天线、适用于点对点连接的高增益高方向性天线,或者适用于多天线“扇区”应用的窄角度天线时,这些信息非常重要。
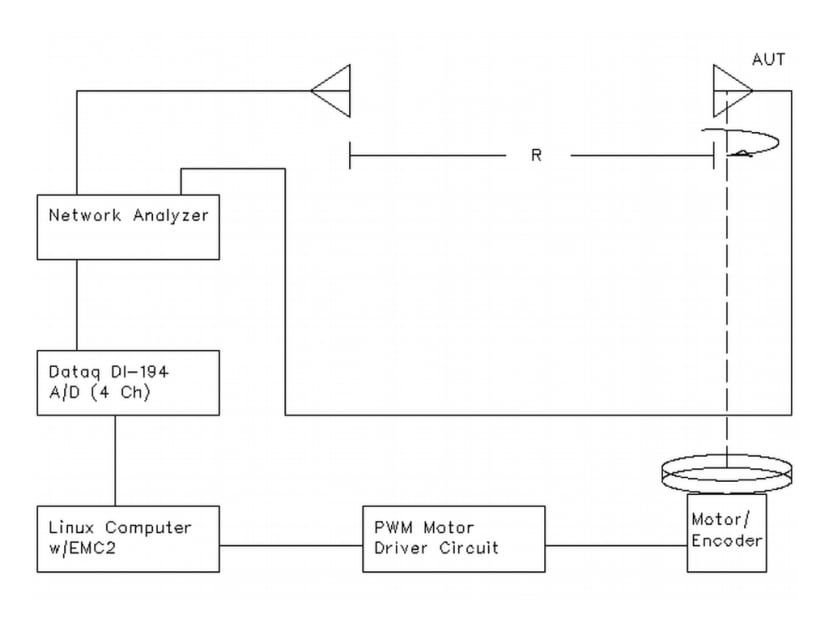
天线测量系统块图(来源:EMCAR 项目)
天线测量的基本原理其实相当简单,我们将被测天线固定在旋转平台上,再将第二根固定天线放置在距离较远的位置。两者都连接至射频网络分析仪,然后在第一根天线旋转的过程中进行测量。非常简单。
本例中,我们不使用成熟的网络分析仪,而是使用一种基于 LimeSDR Mini 软件定义无线电 (SDR) 的解决方案,它更为简单,成本也较低。
电动机

电动机属于关键部件,它的性能将与测量系统的性能相关。我们需要能够准确知道电动机的位置,同时如果不希望过程耗费很长的时间,电动机运行需要非常平稳(否则,天线可能会晃动,那么可能需要在各运动步骤之间暂停一段时间)。
机动平台的尺寸可随意设置。本例中,我们希望它的尺寸较为合理。如有需要,未来可通过连接更大的平台轻松扩展。这样,我们就可以通过三脚架或其它安装底座来直接附加大型天线结构。这意味着我们需要一个坚固的框架来支撑平台,一个坚固的底部轴承,以及一台功率适当的电动机用于驱动平台。
我们的选择很多,可以选择原始 EMCAR 设计中所用的步进电动机。我们还可以使用皮带和皮带轮来降低速度,使运行更加平稳。但是,我们最终选用了带集成驱动电子设备和变速箱的 ebm-papst 电子整流电动机 (187-2145) ,这款电动机在编程后具有极其简单的界面,便于控制和稳定运行。
控制

控制系统将基于 Kunbus Revolution Pi Core (181-1141) ,此平台可轻松扩展,以增加多个工业模拟和数字输入/输出。通过这种方式,我们拥有多种不同的编程选项。我们很可能会结合 Python 与 EMCAR 项目中的已有 C 语言代码。
RF 射频测量
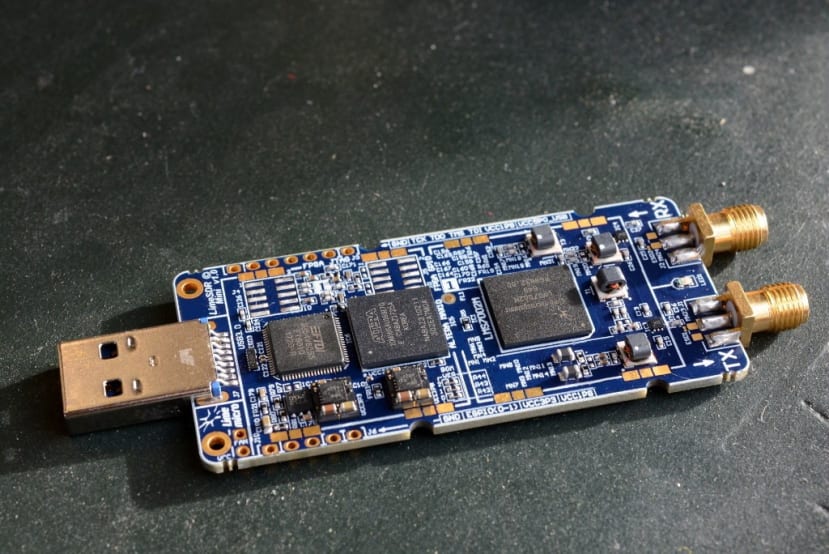
现在我们有了旋转被测天线的方法,还能控制天线的位置以及测量过程,我们需要实际执行射频连接测量。为此,我们将使用低成本的 LimeSDR Mini SDR 生成具有所需频率的信号,并在接收天线处测量这些信号。
下一步
在下一篇帖子中,我的同事 Dave 将介绍平台的电子和机械支撑结构的组合外壳设计和原型设计,以及平台设计,轴承和电动机联轴器。